

{kind=link}
{kind=link}
115/06/30
AI會比你更早發現身體異常嗎?智慧健康與AI照護的未來
鄒明珆|
科技大觀園特約記者
臺大工程科學及海洋工程學系郭振華教授專訪
地球地表有70%被水體所覆蓋,但湛藍水面下的廣堥區域卻鮮少有人類踏足,水中的壓力、密度與溫度變化更構成許多潛在危險。而水下載具便提供相對安全的方式協助人類進行水下活動,早期遙控式水下載具(Remotely operated Vehicles,ROV)主要執行「粗工」類型的工業活動,母船以纜線供電並傳輸資訊給載具,對操作靈活度、節能的要求較低。直到近年水下載具逐漸被賦予水下探勘、調研等任務,在大範圍移動前提下,開始發展無纜線的自主式水下載具(Autonomous Underwater Vehicles,AUV)。但AUV在海中移動同樣會受到操作靈活性的挑戰,並且缺少纜線供電使得節能也成為一大難題。

自主式水下載具。圖/wikipedia
針對水下載具的限制,臺大工程科學及海洋工程學系郭振華教授便指出,若能研發出仿生魚,模仿在水中長期演化的魚類的力學系統-即仿生型自主式水下載具(Biomimetic Autonomous Underwater Vehicle,BAUV)。將有助於克服現行水下載具在海中所遭遇的節能與操作限制。
一般水下載具面對的挑戰:靈活度與節能
一般AUV以剛性機體搭配螺槳作為驅動,在活動時會受到許多挑戰與限制-(1) 靈活度:螺槳驅動的載具無法做到靈巧的迴旋,而淺水層或近岸水流通常較為強勁,更不利於剛性高的AUV活動。(2) 螺槳潛在故障風險:海洋垃圾與水生植物可能捲入螺槳導致故障。(3) 能源使用效率:螺槳驅動載具過於耗能,使得載具活動時間受限無法長期在水下獨立作業。
郭教授也提到,BAUV吸引人之處在於近岸作業時非常好用。一般AUV受限於環境與自身結構的限制,在近岸作業時常綁手綁腳。相較之下,BAUV柔軟的身軀可以在狹小空間內迴旋自己的身體,並且透過擺動尾鰭、胸鰭或是排水等方式推進,沒有螺槳捲入水草與垃圾的問題。
不過,BAUV在設計上也需要考慮諸多因素。例如,BAUV通常以連桿原理驅動鰭片擺動,需要考慮零件彈力係數多少、擺動幅度才能接近魚鰭的擺動。此外,生物學家甚至嘗試發展人工肌肉,利用改變材料的溫度或壓力,達成材料的膨脹收縮,進而模仿肌肉纖維的伸長與縮短。但相較電動馬達,人工肌肉目前提供的力量輸出較小、速度不夠快,只適用於小型載具。而且軟性人工肌肉如何承受海底高壓也須進一步研究。
郭教授提到中國浙江大學發表於Nature期刊的研究,便參考深海獅子魚(hadal snailfish)的身體結構,捨棄堅硬的抗壓外殼,改以柔軟的矽氧樹脂等聚合物包裹電子零件,並有著一對大而薄的翅膀規律擺動提供動力,最終成功地在馬里亞納海溝10000公尺深的海底游動。
作業環境大不同:淺海與深海作業的挑戰
如同魚類適應其生活環境演化出不同型態,在淺海與深海作業的BAUV外型設計也有不同。淺海因為有較為強勁的海流波動, BAUV通常接近流線型,能因應海流借力使力、做出高速的迴旋動作。郭教授以溪流中的魚類為例,在溪流中常可以看到魚類緊貼在石頭後方游動。原理便是利用水流經過石頭後形成的反向渦流,幫助牠們不費力地在流動的溪流中保持在固定位置。
反之,深海水流較小,主要的問題是密度躍層(Pycnocline)、通訊與環境偵測:
(1) 密度躍層:海水密度受溫度、鹽度與深度影響,通常密度會隨水深增加而變大,直到一定深度後,深度的影響降低。此時,密度主要受溫度與鹽度影響增加,有時會突然形成一道密度劇烈增加的水層,便稱為密度躍層。若BAUV無法改變自身密度,可能因浮力太大無法突破向下潛入。相反的,也可能無法有足夠的浮力向上浮出水面。
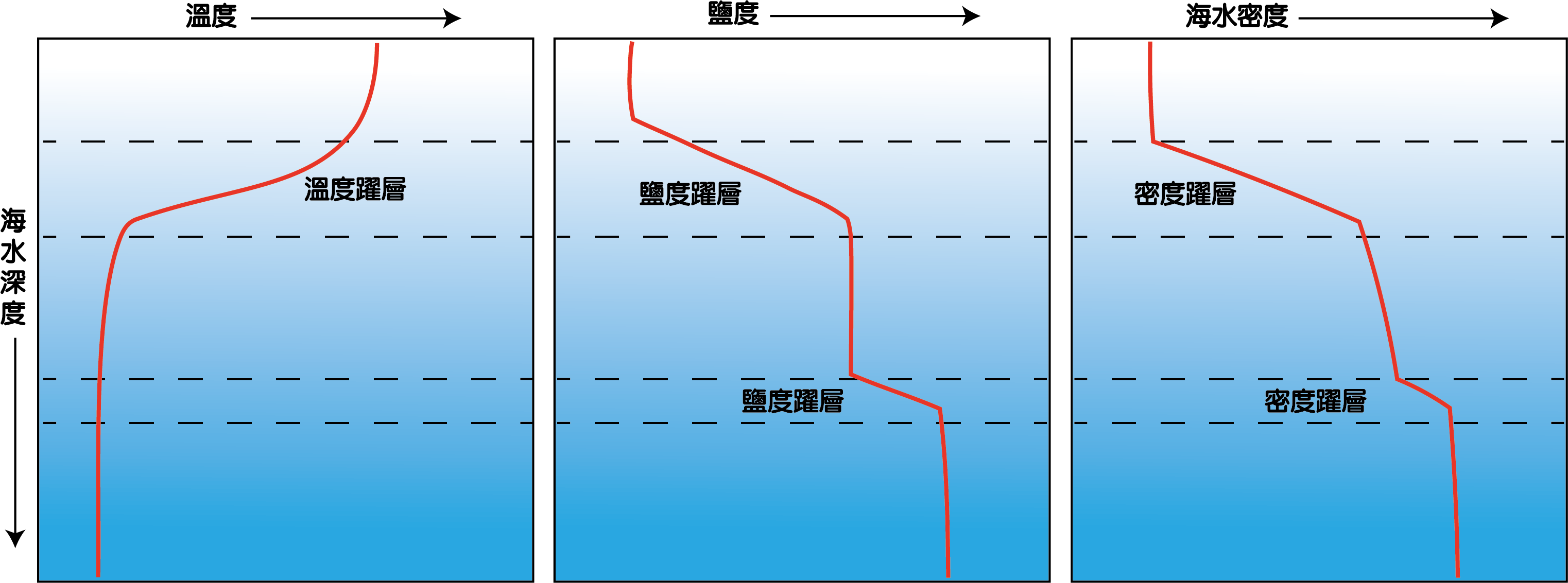
海水密度到一定深度後,受到溫度及鹽度的影響形成密度躍層。資料來源/Physical Oceanography 1:The physics of seawater
(2) 與水面的通訊:深海作業的BAUV與母船間可能相隔有數公里厚的水層阻斷電磁波傳遞,使得資訊聯繫變得更加不易。儘管仍可利用通訊聲納與水面聯繫,但同樣面臨電力的限制。郭教授也提到或許載具不需要頻繁地與水面聯繫,以比目魚為例,比目魚身形扁平且長期在海底,幾乎與海底融為一體。教授指出若能設計一種BAUV模仿比目魚,不主動探測水面有甚麼,而是被動的接收資料與訊號,節省探測消耗的能量。直到接收到特定訊息,才啟動運動機制做出回應。另外,也可以在BAUV活動的範圍設置具有電磁感應接頭的海底電纜,BAUV只要貼在電纜上便可以直接傳輸訊息與充電,更為方便與節能。
(3) 辨識周遭環境與導航:在深海無光環境中,BAUV需要依靠聲納或是磁力感測周圍環境,但如何自主導航與定位仍是一大挑戰。因此,郭教授提到魚類在水中成群活動時,並不是依靠視覺追蹤前方的領游者,而是利用身上的體側線感測周圍流場的壓力變化,進而達成追蹤。教授近期的研究便模仿參考魚類體側線的原理使BAUV能夠追蹤前方的領游者。
神奇的設計讓仿生魚能自主追蹤其他魚類:模仿魚類的體側線
深海大部分魚類雖然視覺已經退化,但在掠食者靠近時仍然能快速地閃避。而淺海常可見到魚群快速地變換,形成螺旋等幾何圖案。這些行為部分仰賴的便是魚身上的體側線細胞,以纖毛感測水流加速度與壓力梯度變化,進而辨別周遭環境的變化。
近年,研究者們也嘗試模仿魚類體側線原理讓BAUV得以感知並與周遭環境互動。體側線的模仿可利用微晶片技術,搭配類似纖毛的感測元件達成。另一種則是現成的壓力感測器,以壓電材料將壓力變化轉為電壓。以此原理透過排列於BAUV體表的壓力計陣列感測,並反推出壓力源頭加以分析是否遭遇地形障礙,或有其他移動的物體正在靠近。
郭教授的團隊也以模仿魚類體側線的方式,透過側線的排列與偵測方程式的推算可以得出前方壓力源位置的方式,協助BAUV追蹤前方的領游者。結果發現當領游者位於BAUV前方一定角度扇形區域內時,對於領游者(壓力源)的跟隨與定位最為準確,這項發現也與現實中魚類追蹤行為的統計數據一致。
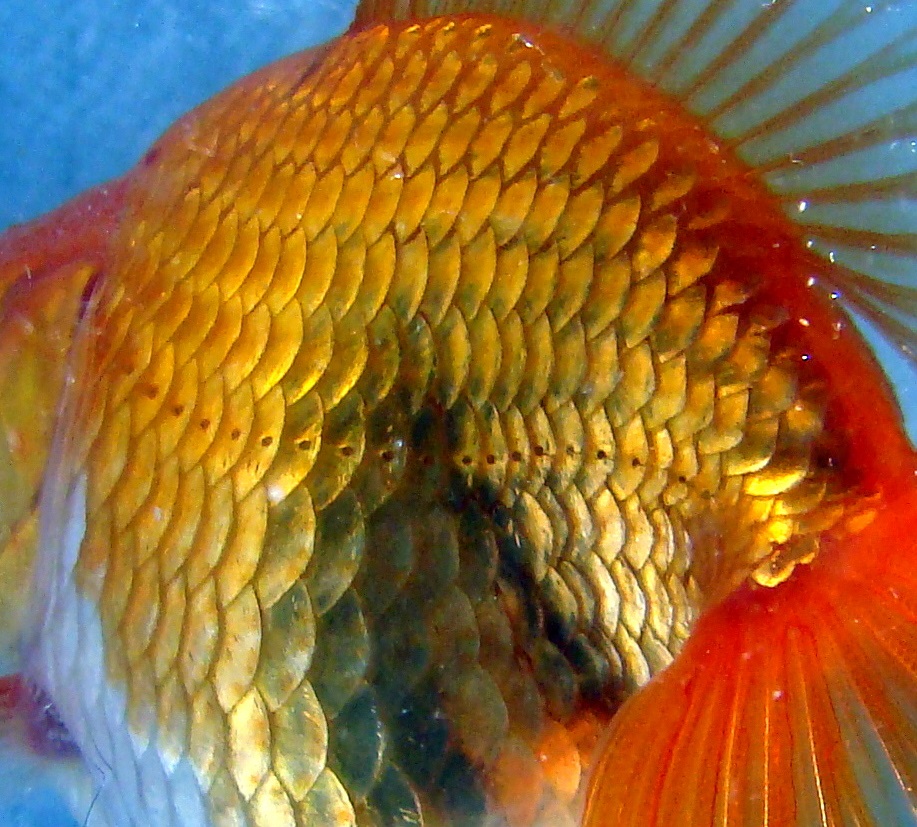
金魚的體側線。圖/wikipedia
不過,郭教授也提到體側線感測原理的限制,一般魚群群游時個體如此緊密相鄰,部分可能肇因於體側線有效感測的距離限制,其感測的水壓變化頻率較低、無法遠距離傳遞。因此若要使用水壓做導航,必須與相鄰的魚群靠得非常近。
未來展望
提到BAUV未來的發展目標,郭教授說,BAUV在近海、淺水等水流強勁的區域能達成傳統AUV所做不到的操作,並能克服螺槳驅動載具的風險。甚至能利用海流或旋渦的水流「借力使力」,以較少的能量運作。除了近海作業,BAUV也被看好能應用於海底探勘,節能的優點使BAUV能大範圍的蒐集資料,高度的靈活性也能幫助其閃避障礙物,研究結果可以應用於民生與國防用途。
例如,郭教授本次受訪前便剛結束黑潮發電的海上調研工作,未來若能以BAUV調查海洋渦流與季節、地域等變因間的關聯,更能有利於研究者以及政府做出有效率的決策。
 姓名標示─非商業性─禁止改作
姓名標示─非商業性─禁止改作
本著作係採用 創用 CC 姓名標示─非商業性─禁止改作 3.0 台灣 授權條款 授權.
本授權條款允許使用者重製、散布、傳輸著作,但不得為商業目的之使用,亦不得修改該著作。 使用時必須按照著作人指定的方式表彰其姓名。
閱讀授權標章或
授權條款法律文字。