
115/02/25
把飲食紀錄交給 AI 分析?重點不是算熱量,而是看穿你的「飲食習慣」
黃宜稜|
科技大觀園特約編輯
試想,人類與機器人在駕駛汽車時,要維持車與車之間等速前進,誰會 hold 得最好呢?答案很明顯是……機器人!為什麼呢?關鍵就在於「人類的反應速度」,反應速度因人而異:當老(手)司機在開車時,他們能夠對於哪時候該踩剎車、油門的反應速度快,因此不會因誤判與前車之間的距離,而落下一大段「空白車距」;然而菜鳥司機就不一樣了,他們反應速度沒有老(手)司機快,所以在看到前方車輛時,因無法正確判斷哪時候踩剎車最恰當,加上基於安全意識都會先減慢避免 A 到前車為第一反應,「空白車距」自然就出現了!而後方的車輛們會因為這位菜鳥司機(老鼠屎)的行車速度減慢而開始擠成一團,造成塞車。

▲遇到塞車,相信大家都會感到相當煩悶不堪。(圖/Pixabay)
相反地,當機器人在行車時,因為他們的動作程序一致,因此能穩穩地維持等速行駛。這也就是為何現今車廠想推出自動駕駛車(以下簡稱「自駕車」)的原因之一。自動駕駛真有那麼神嗎?讓我們來一一剖析它吧!
自駕車大小事
自動駕駛,顧名思義就是讓車子在無人為操作的情況下,將行車速度與控制車間距離等原本需要手動操控車子行進的動作轉為自動化,以減輕駕駛人的行車負擔。
※自動駕駛分級:
自動駕駛可是也有分級制度的!國際汽車工程師協會 (Society of Automotive Engineers, SAE) 依據汽車的自動化程度分為以下級別:
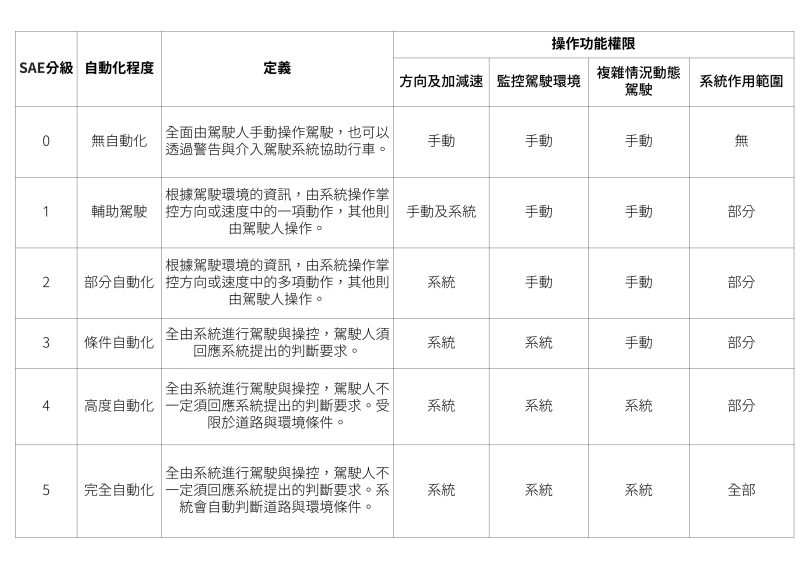
▲(表格參考自:SAE International )
時至 2020 年末,汽車業的自動駕駛即將發展至第四級,第五級則是各企業競相達成的最終目標。
※自駕車的配備主要有哪些?

自駕車能透過感測器偵測車距以維持車與車之間最佳距離。(圖/GIPHY)
自動駕駛真的能解決塞車嗎?
自駕車本身雖能達到自動辨識路口標誌及安全煞停系統,但它就像一個好的食材,需要透過精湛的廚藝及調料的輔助才能發揮它最完美的風味,而輔助自駕車的便是「車聯網」。究竟什麼是「車聯網」?自駕車與車聯網的搭配真的能解決塞車嗎?就讓台大資工系的林忠緯教授來幫大家解惑吧!

林忠緯教授
林忠緯教授小檔案:
林忠緯教授在博班時期的研究題目即是關於 Cyber-Physical System (CPS) 的研究,而 CPS 簡單來說是指能夠執行物理層面上動作的電子產品,例如車子(能在路上行走)、心律調節器(能放電控制心律)都屬於 CPS。林教授在博班的研究即是關於車子的 CPS,也曾在美國通用汽車 (General Motors) 實習,畢業後持續拓展自己所長,進入加州矽谷的豐田汽車 (Toyota InfoTechnology Center) 擔任研究員。林教授熟知自駕車與車聯網的研究,自身也致力於自駕車、車聯網與資安問題的研究,並開心表示對於未來 28 年後自駕車的展望懷抱深深的期許。
1. 車聯網是什麼?
車聯網 (Internet of Vehicles,IoV) ,是指車與車之間 (vehicle-to-vehicle,V2V),或車與道路狀況 (Vehicle-to-everything, V2X) 之間利用網路互相交換、接收感測器所會彙整出的訊息,以達到更完善、迅速的交通網絡資訊交流,讓用路人能即時獲得路況的整體資訊。

▲車聯網就是車子版本的物聯網。(圖/Pixabay)
2. 自駕車結合車聯網真能解決塞車嗎?
若要剖析塞車問題,其實可以分成以下幾種狀況,自駕車必須面對各種塞車情況作出相對應的解決方案。
一、選擇路徑:假如過年走春行程是去宜蘭玩,大家通常會想到要走雪隧,然而當大家都走雪隧的話,勢必會造成大塞車。而車聯網能即時追蹤到已經開始塞車的道路,並通知自駕車可以改走較為不塞車的路段(例如北宜),這時候就達到了疏散車流量的效果。
二、路口與路口間的交通號誌:假如今天車子走在路上,一路都是綠燈當然令人心情愉悅,反之,則會導致後面開始塞車,因此在車聯網當中也可以整合總體交通號誌的順暢運行。
三、單一路口的車輛運行:通常遇到駕駛人遇到路口,都需先放慢行駛速度,觀察轉角方向是否有來車,再行通過;當一個路口車多時,塞車肯定逃不掉!而車聯網能達成上述第二點的升級版——便是不用交通號誌!車聯網就像是開上帝視角,可以同時獲得路口的各道路資訊,而這些資訊是單一自駕車無法自行偵測的,自駕車針對這些資訊做出相對應的動作,而自駕車對於這些動作的控制能比駕駛人更加精準,因此車聯網與自駕車能夠相輔相成增加路口的運行效率。

自駕車結合車聯網能達成無須紅綠燈,路口間也能順暢行駛。(圖/GIPHY)
四、單一車輛的運行:車聯網與自駕車亦能互相搭配在安全的前提下縮短跟車距離並減少過度保守的煞車,如此道路的使用率能夠提升,也能減少塞車的機率。
林教授認為自駕車結合車聯網勢必能解決部分層面的塞車問題,也能避免酒駕、恍神、視線死角等人為意外肇事的發生比率,但在現實生活要自駕車能實際放在道路上跑,現階段仍面臨重重難關。
3. 自駕車的發展現階段會遇到哪些瓶頸?
讓我們想像一下,當自駕車、車聯網已完全取代所有的交通系統,實際上最有可能會發生以下幾種瓶頸:
瓶頸一:自駕車的整合系統尚未完善
林教授個人認為目前自駕車的整合系統會是一大問題,即便供應商提供再好的車組配件,配件與配件之間的整合系統不佳還是會造成車子載運行時效率不佳,甚至還可能會釀成車禍,或是遭駭客入侵自駕車系統。所以教授認為設計一個具縝密規畫的整合系統,不僅可以讓車子運行順暢,也能保障駕駛人的安全。
瓶頸二:法規訂定的難題
當自駕車發生車禍了,那誰該跳出來負責任呢?該怪自駕車內部的機器學習沒有收納進這些意外狀況的數據嗎?還是都是工程師的錯?其實這也是自駕車衍伸出的頭疼題,而林教授針對這個問題也提出相關建議,例如在購買自駕車時,售價的一部分可以作為保險補償,當發生意外時,便能獲得補償金。
瓶頸三:消費者的接受程度
消費者在購買商品時常會考慮價格及使用感受,而自駕車雖然目前製造成本高昂,但相信未來隨著自駕車的研發技術逐漸成熟,成本也會隨之下降,但成本要降到多低才能達到量產,以及售價普遍是消費者能接受的範圍仍是個問題。另外,感受度的部分,當我們坐進自駕車裡面,由於自駕車可以精準縮小車距,因此當對向來車很近地迎面衝過來,真的不會嚇到嗎?因為自駕車有別於以往的行車感受,所以也不見得能被所有消費者接受。
另外,有部分消費者享受自己駕馭車子的樂趣,所以他們也不會想使用自駕車,當道路上並非統一是自駕車的情形,要達成車聯網更是難上加難哪!

▲並不是所有消費者都喜歡選擇自駕車,畢竟開車對許多人來說也是一種樂趣和享受。(圖/Pixabay)
瓶頸四:資安問題
自駕車結合車聯網運行時極需網路,而有網路的地方,駭客便如影隨形,當駭客像電影情節一樣駭入車聯網時,不但會構成駕駛人的性命威脅,甚至還會造成全面性的交通世紀大癱瘓!水能載舟亦能覆舟,車聯網雖能讓交通運行更順暢,也可能會釀成一場可怕的災難,因此林教授強調維護資安也是設計車聯網的重點項目。
解決塞車問題的理想藍圖
當我們檢視塞車問題的視野再拉遠一點,除了自駕車及車聯網以外,教授也慷慨地分享了以下管道解決塞車問題:
結語
雖然現階段自駕車要完全解決塞車問題仍需經時間歷練,但相信透過林忠緯教授及眾多研發單位的辛勤貢獻,大家在春節期間能夠利用自駕車與車聯網享受更加順暢、迅速的行車體驗,而不再受塞車之苦的日子指日可待!新春期間,也祝大家行車平安,旅途別塞!
 姓名標示─非商業性─禁止改作
姓名標示─非商業性─禁止改作
本著作係採用 創用 CC 姓名標示─非商業性─禁止改作 3.0 台灣 授權條款 授權.
本授權條款允許使用者重製、散布、傳輸著作,但不得為商業目的之使用,亦不得修改該著作。 使用時必須按照著作人指定的方式表彰其姓名。
閱讀授權標章或
授權條款法律文字。