在上一篇文章中─讓自駕車各行其道(一),我們介紹了自駕車方向盤控制的重要性,以及說明何謂PID,接下來,我們將在本篇文章中,分別介紹有關PID的三種修正方法以及實際應用狀況。
PID的解釋,分別為:P Control(比例控制)是一種最直覺的修正方法,只看目前誤差有多少就修正多少,但如果只看比例修正,可能會導致修正的結果無法完全準確,主要原因為現實環境中會存在著外在的干擾,以及考慮瞬時誤差變化量的問題,所以需要另外兩種修正法來協助修正;I Control(積分控制)概念是用於連續函數中取得面積,假設誤差量是一個連續函數,當這個誤差量受外在因素干擾,而無法透過P Control修正使得誤差量有所減少時,我們就可以使用積分的方式,來修正這個誤差量;而D Control(微分控制)定義上是利用誤差的改變程度,也就是瞬時的誤差變化量,來預測未來的趨勢,調節下一個時間單位需要修正的量,使修正結果更加準確。

圖片說明:現代的PID控制器,是觀察舵手的動作而設計出來的,要控制船舶航行的方向,就如同是在道路上控制行車的方向,不只是需要偵測目前的誤差(P),也需考慮過去累積的誤差(I)以及誤差的變化趨勢(D),才能讓結果更加準確。(網址:https://zh.pngtree.com/)
PID行不行
圖一及圖二皆為同一則網路影片的截圖,這段影片主要是在介紹PID在自走車上的應用。圖一介紹的是何謂比例修正(P control),圖二則介紹了包含三種修正方法的範例說明,在圖二中藍色路線為自駕車預定抵達的路線,依照P control之理念,它會直覺地以與目標線的差距多寡來判斷需修正的距離,以綠色的箭頭表示;在I control上,它會用來修正因外在因素所累積的誤差,通常為一加強的修正量,以紫色的箭頭表示;最後在使用D control的概念上,藉由量測誤差的變化量來推估路況及車況的瞬間變化,以咖啡色的箭頭表示。
結合PID等三種判斷所產生之最終修正方向為紅色,它可以協助自駕車更為穩定平滑地行駛到預定路線。通常來說,其實只需用到P即可達到基本的修正效果,而I與D多為輔助修正,但因為自駕車的行駛速度很快,因而需要有D control提早預測可能的變化,以即時調節修正量,也因在道路上有許多不可預期的外在因素影響車輛的行駛,因而需要有I control來加強某些修正的力道,由於I與D的修正方法包含微積分的數學觀念,也歡迎有興趣的讀者,可以先了解微積分的概念,將可更清楚I與D所代表的意思。
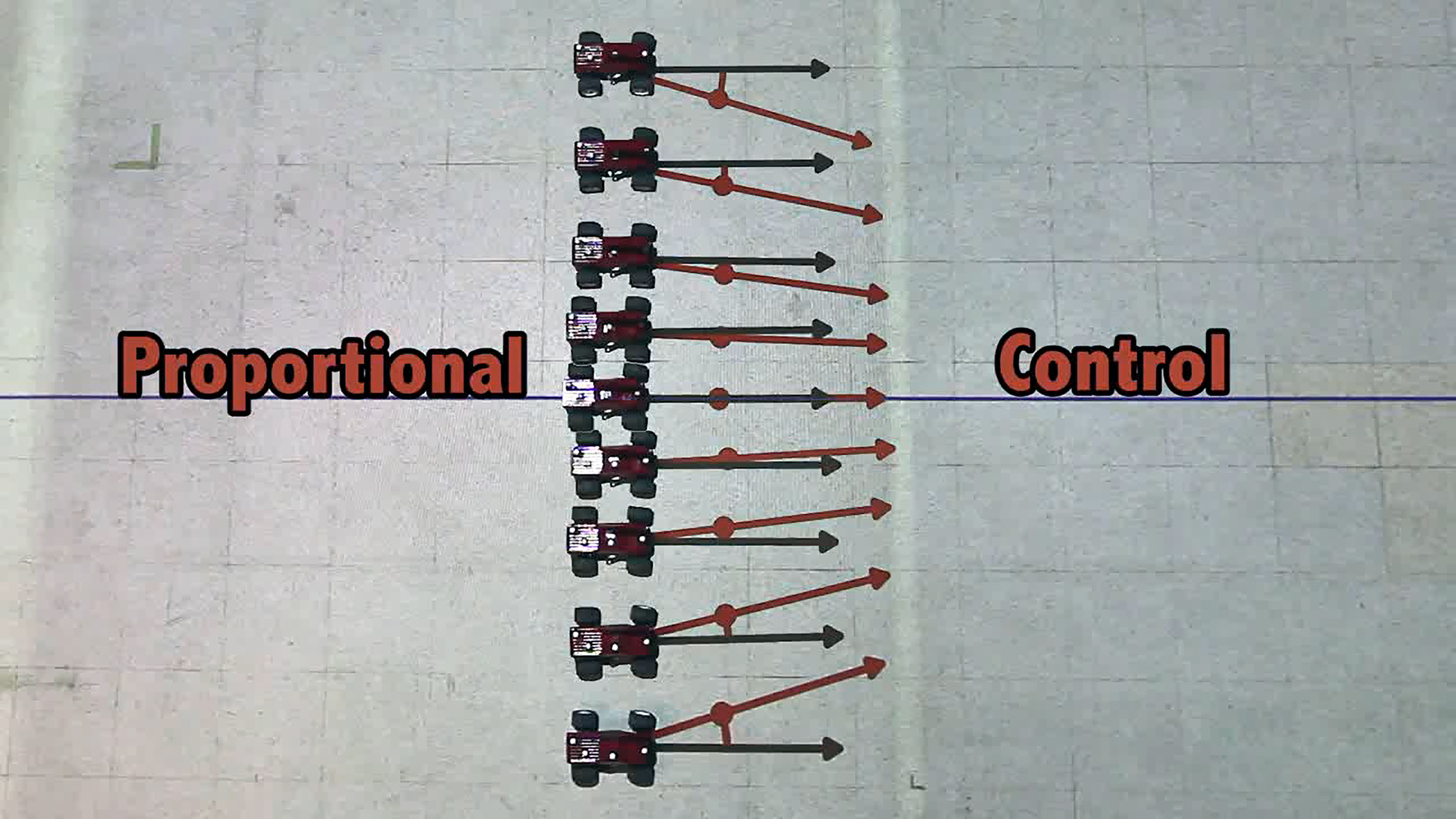 (圖一)圖片說明:P control是一種最簡單的修正方式,只會依據與目標的差距,而決定修正量的大小,也就是車輛與中央的目標藍線差距多少,來決定需修正多少方向盤的角度的多寡,如最上方與最下方的車輛,當距離目標線越遠,角度就需改變越多(網站名稱:Controlling Self Driving Cars/網址:https://www.youtube.com/watch?v=4Y7zG48uHRo&list=PLgVoI6rhKUAmeOxIGZdzorcZ3gT3OIiPC)
(圖一)圖片說明:P control是一種最簡單的修正方式,只會依據與目標的差距,而決定修正量的大小,也就是車輛與中央的目標藍線差距多少,來決定需修正多少方向盤的角度的多寡,如最上方與最下方的車輛,當距離目標線越遠,角度就需改變越多(網站名稱:Controlling Self Driving Cars/網址:https://www.youtube.com/watch?v=4Y7zG48uHRo&list=PLgVoI6rhKUAmeOxIGZdzorcZ3gT3OIiPC)
 (圖二)圖片說明:自駕車PID行駛角度修正的範例說明,P control為最主要的修正方法,以綠色箭頭表示;I control與D control分別以紫色和咖啡色箭頭表示;結合三種判斷所產生之最終修正的方向,以紅色箭頭表示。(網站名稱:Controlling Self Driving Cars/網址:https://www.youtube.com/watch?v=4Y7zG48uHRo&list=PLgVoI6rhKUAmeOxIGZdzorcZ3gT3OIiPC)
(圖二)圖片說明:自駕車PID行駛角度修正的範例說明,P control為最主要的修正方法,以綠色箭頭表示;I control與D control分別以紫色和咖啡色箭頭表示;結合三種判斷所產生之最終修正的方向,以紅色箭頭表示。(網站名稱:Controlling Self Driving Cars/網址:https://www.youtube.com/watch?v=4Y7zG48uHRo&list=PLgVoI6rhKUAmeOxIGZdzorcZ3gT3OIiPC)
結語
要把車穩定且準確地開在路中央,對人類來說,可能是很簡單的事,但如果是要機械可以自動執行這些行為呢?我們就需要設計數學公式,如:撰寫程式來控制機器,告訴機器如何做到這些類似人類行為的反應。很神奇吧,雖然PID並不是很新穎的科技,卻是自動駕駛要成功上路的關鍵技術,如果自駕車沒辦法正確的行駛在它該行駛的車道上,那後果將是不堪設想的,所以在享受科技所帶來的便利的同時,也不妨也可以嘗試了解這些科技背後的數學原理吧!
參考資料:
1.PID控制原理教學
http://www.ni.com/zh-tw/innovations/white-papers/06/pid-theory-explained.html
2.The Working Principle of a PID Controller for Beginners
https://www.elprocus.com/the-working-of-a-pid-controller/
3.PID Controller-Working and Tuning Methods
https://www.electronicshub.org/pid-controller-working-and-tuning-methods/
4. Controlling Self Driving Cars
https://www.youtube.com/watch?v=4Y7zG48uHRo&list=PLgVoI6rhKUAmeOxIGZdzorcZ3gT3OIiPC
總編輯:國立中山大學資訊工程學系 黃英哲教授
(本文由科技部補助「
新媒體科普傳播實作計畫」執行團隊撰稿)
