 各式的智慧安全系統開發與技術發展都是朝向智慧車輛自動駕駛的最終目的,可有效協助駕駛者不需經由人工控制,自動順利到達目的地。
各式的智慧安全系統開發與技術發展都是朝向智慧車輛自動駕駛的最終目的,可有效協助駕駛者不需經由人工控制,自動順利到達目的地。
智慧化,一個原本看似瘋狂的概念,隨著新興技術發展,已逐漸成為對於未來生活願景的指標,期待在未來某一日就改變了生活和工作的樣態。對建構一座智慧城市而言,「智慧型運輸系統」可說是民眾對行的基本要求,它是一個包含控制、資訊通訊及交通運輸的跨領域整合系統,是人、車和路三者間的交互、連結和整合,而智慧車輛是一個重要環節,嵌合其中影響這複合系統的發展。
1925年,無線電設備公司Houdina Radio Control改裝Chandler汽車設計出一輛「無人」駕駛的汽車American Wonder,成功地由紐約百老匯開入第五大道。American Wonder車輛後座裝載無線電接收設備,接收的無線電信號經過譯碼過程,進而驅動馬達操作汽車方向盤、剎車、油門等,讓信號輸入得以控制車輛移動。
1939年,無人駕駛的概念出現。美國通用汽車公司於當年的世界博覽會打造了一個名為Futurama(未來世界)的未來科技展覽,在展示中,幻想著1960年時的美國,高速公路設置有類似於火車軌道一般的設計,汽車配有自動駕駛系統,當行走至高速公路上就自動啟動,使車輛循著軌道且以一定的速度高速行進,直到在高速公路的出口才恢復成人類駕駛。
2005年,Sebastian Thrun主導Google公司無人駕駛汽車的研究計畫,被視為Google car無人駕駛汽車的發明者或無人車之父。他本著私人因素投入智慧車的研發,期望藉由自動駕駛系統減少車輛意外事故的發生。2016年,隨著無人車技術逐漸明朗,Waymo公司從Google獨立出來,開始進行無配置安全駕駛員的自動駕駛汽車測試。從上述簡略的智慧車發展史,可見智慧車的概念和夢想已編織和努力了近一百年。
隨著雲端資訊系統及能源運用的發展,結合汽車、半導體、電子、資通訊、光電等科技,以及多種不同的感測器、雷達、無線通訊、攝影機等裝置於一身的智慧車輛,基本可定義為包含能源系統、安全系統及車聯網系統3大構面,分別與能源產業、機械產業及資通訊產業的相關技術研發息息相關。
動力系統是汽車的基礎環節,是汽車性能的指標,許多駕駛者對於駕車的夢想發源於此,因此催生出汽車產業的多項革命和代表作。純電動車又稱電瓶車或電池電動車,是指由事前已充滿電的電池供電給電動機,再由電動機推動的車輛。而電池的電量由外部電源補充,具備零碳排放的環保優勢,是智慧車輛能源系統開發應用的目標。
電動馬達和電池是全電動車的組成要素。電動機(馬達)的效率遠高於引擎(馬達80%以上,汽油引擎15%,柴油引擎20%),在同樣的輸出動力下,重量較輕且扭力穩定。電池構成電動車的主要製造成本,生產過程的排碳量也占據大部分使用周期排碳量(約43%),現今電動車使用的電池類型是鎳氫電池或鋰離子電池。
由於純電動車的開發受限於電池效能(續航力)、充電技術、充電環境建置與普及、民眾接受度、消費者用車觀念等主客觀因素,使得智慧車輛發展出插電式混合動力車或增程型混合動力車的過渡型態產品,車輛電力可依靠外接插頭充電、內燃機充電及蓄電池貯存。這類過渡性產品可解決充電環境尚未建置完善的問題,舒緩消費者的不安全感,並藉此累積充電環境和交通營運相互整合的經驗,作為電動車發展與推動遭遇困境及瓶頸時可參考的解決策略。

<
智慧車輛安全系統的架構
車輛的安全性始終是設計者、製造者與駕駛者關注的問題。智慧車輛針對安全系統的要求,除了以被動防護技術或結構來提高車輛的安全性外,更強調主動安全的要求,著重於先進輔助駕駛系統的設計開發,即配合科技與裝置進一步在事故可能發生前就動作。例如在主動式防碰撞系統中,車輛利用裝配在車輛上的感測裝置所提供的資訊運算,在事故可能發生前便可警示駕駛者或產生相對應的動作(如自動減速)等,降低事故發生的機會。
現階段智慧車輛先進輔助駕駛系統的發展,名稱雖多樣,但主要功能包含適應性巡航系統、車道偏離警示系統、盲點偵測系統、防碰撞系統、停車輔助系統等。無論如何,各式的智慧安全系統開發與技術發展都是朝向智慧車輛自動駕駛的最終目的,可有效協助駕駛者不需經由人工控制,自動且順利到達目的地。
依靠感測器、電子控制單元和致動器的結合運用,輔助駕駛系統使車輛具備偵測、判斷、作動等的功能,達到智慧機械的基本需求。感測器,即機械感知能力,可測量環境並按照一定規律轉換成可用輸出信號的器件或裝置,通常由敏感元件和轉換元件組成,常用的有紅外線、雷達、光達、攝影鏡頭、熱感應等產品。致動器,可驅使機器及機構產生設計的動作,可以是馬達、氣壓缸、液壓缸等。
「車聯網」是物聯網在車輛載具和交通運輸上的應用,透過感測元件運作、電腦計算與判定、車輛系統分析、行車資訊傳遞、網絡連結、道路系統整合、雲端管理等設備和環境間的多工整合作業,串接人、車、路三者和雲端運算系統,提供許多傳統車輛無法達到的功能。
在車與路之間的應用可包含路口燈號與前方路況警示、電子付費、停車場資訊、交通事故警示、工地∕學校區域提示、動態導航等。在車與車的通訊可包含協同傳遞碰撞警示、車道變換警示、前方車輛煞車警示、碰撞前感測警示、緊急車輛接近警示等。在車與人之間的資訊交換可包括主動防護、協同防護(行人通過警示)、車輛維護等。
 M-city自動車輛測試地圖
M-city自動車輛測試地圖
車聯網的基本架構與物聯網相同,可分為感知層、網路層及應用層。感知層的任務主要是接收訊息,透過感測元件和技術偵測車輛訊息,感知行車的狀態和環境,就像人體的五官接受不同的外界刺激。網路層的任務定位是傳遞訊息,相當於人體的神經網路,透過有線及無線的網路科技,把訊息傳遞至位於雲端的主機,解決車與車、車與路、車與人、車對網路等的訊息互通。應用層的任務定位是運用訊息,位在雲端的主機會接收到大量的使用訊息,經過大數據的分析後,做出反應並給予各裝置相對的指令,如同人類的大腦中樞。
車載資通訊是車聯網的研究重點,自1990年代開始發展,第一代車載資通訊系統是V2Z(Vehicle to Zero),屬於獨立運作的車內封閉系統,可視為車輛娛樂資訊系統,主要提供廣播和影音功能,一般不具備無線通訊功能,或通訊能力很有限。第二代車載資通訊系統是V2I(Vehicle to ISP∕TSP),可進行車與外界環境和中心的連結,開始發展於1997年,可利用手機3G∕3.5G的行動通訊模組建構GPS,以提供駕駛行車安全及行車中心相關服務。
第三代車載資通訊系統是當前努力中的V2X(Vehicle to Everything),主要著眼於車與外部的連結,車輛具備自主偵測功能,可透過車用環境無線存取技術或專用短距通訊來傳遞訊息,具有低傳輸延遲、高傳輸距離的特性,可進行即時資料交換。雲端間則運用無線網路以滿足高速運動下的大量資訊交換,使系統成功延伸擴展至網路層的各個功能面向,可大幅提升行車安全、效能與行車輔助,建構人、車、行車環境等三者間互動的最佳化整合,成為智慧運輸系統的一環。
<
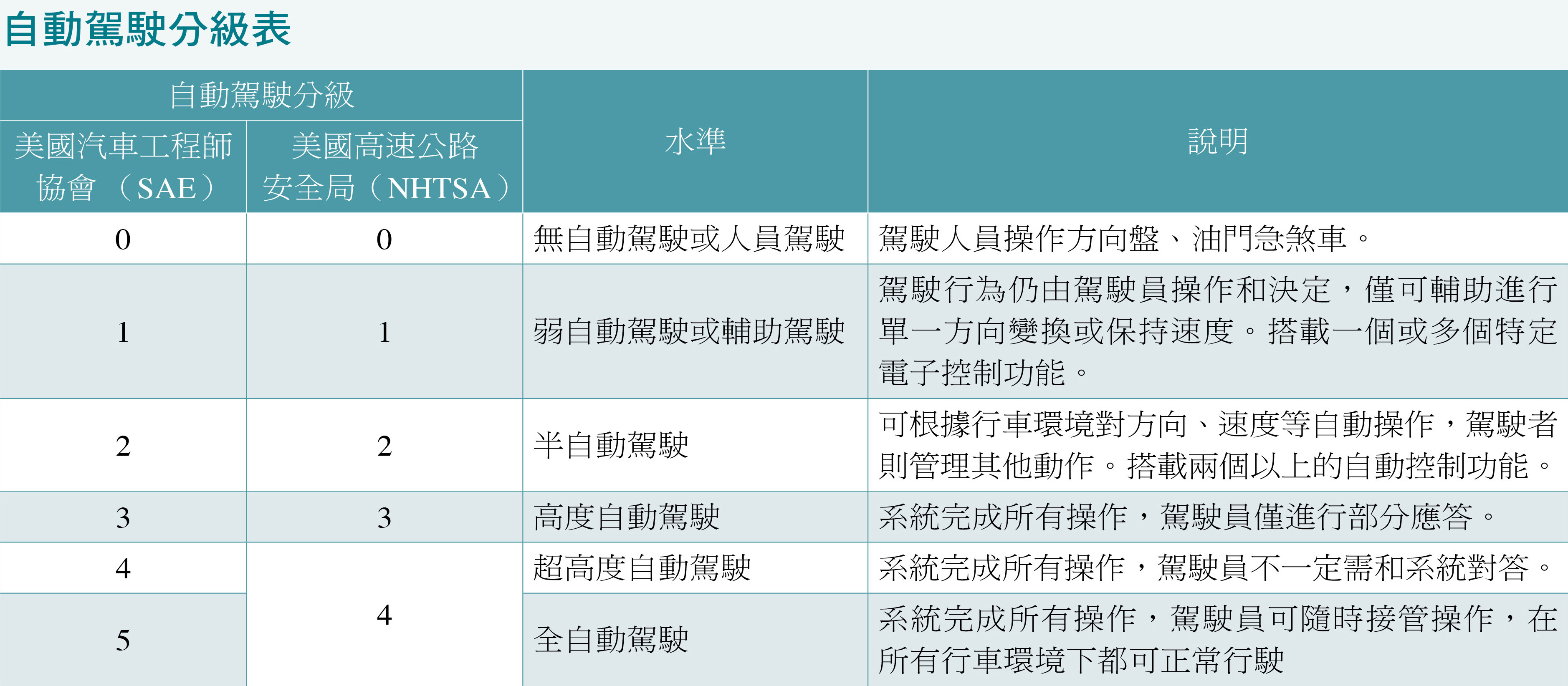
自動駕駛分級表
車輛智慧化的最終目標是實現車輛的全自動駕駛,即無人車(載具)。自動駕駛常與駕駛輔助系統混淆,兩者間最主要的區別在於人的參與度,自動駕駛是完全不需要人參與,而駕駛輔助系統雖不需要人類持續干預,但需要人適時干預決策。
美國汽車工程師協會(SAE)與美國高速公路安全局(NHTSA)分別對自動駕駛提出分級系統,SAE定義6個級別(從0到5),NHTSA則定義為5個級別(從0到4),對照使用者所期望的全自動駕駛,則分別屬於SAE的第4~5級和NHTSA的第4級。以現今的技術和產品而言,目前所謂智慧車輛上所搭載的行車系統僅能算是駕駛輔助系統。
自動駕駛車輛的開發需要一定場域,且有系統地規劃設施和情境進行測試。M-city是密西根大學建置的一座可提供給自動駕駛車與車載通訊技術測試的場域,面積約32英畝,內容具備多重的測試情境,主要用於自動駕駛車在都市中的模擬測試,如隧道、十字路口、彎道、快速道路等情境,可以快速測試自動駕駛車在都市內各種道路狀況下的各種反應。國內方面,因應自動駕駛車輛的研發,在士林科技園區及沙崙分別建置可讓自動駕駛載具以真實道路情境模擬的實驗場域,可供國內教學、研發等單位進行測試。
智慧化一詞說來簡單,但實現起來處處充滿挑戰。除了科技的挑戰外,尚包含人的挑戰,如何在人與機器間取得平衡和劃分權責,就是一個棘手的難題。近年來,智慧車輛的發展隨著能源、偵測、控制、資通訊等關鍵技術的到位,有了突破性的成長,多家車廠爭先推出相關技術和代表作。然而對於車聯網的布局,仍有待整體運輸環境和系統的建置。此外,在智慧車輛發展的背後議題,行車責任的歸屬隨之浮出檯面,非屬科技專業的層面確實有待法治專業介入解決。無論如何,智慧車輛還是智慧運輸系統的要角,隨著「行的夢想未來」進步。
