基於雙方的專業,張禎元與裴育晟的團隊合作測量了人體結構與運動範圍後,設計出各手指關節可分別進行生物化運動的機器外骨骼,近幾年內已協助許多復健傷者或中風患者重獲新生。這項研究成果已發表於期刊 IEEE Transactions on Industrial Electronics1,未來希望能形成商業模式,甚至推動政府以租用的方式提供給鄉鎮使用,使居家復健不再遙遠。
取得國際專利可由線張力評估關節鬆緊程度的復健機器手。(圖/張禎元提供,作者中文化)
模擬人類運動功能的機器手
在研發復健外骨骼的過程中,張禎元同時觀察到長照智慧機器人領域中的共同技術缺口:「手」。許多機器人在視覺、聽覺甚至溝通上都相當進階聰慧,但是手卻不夠靈巧,無法勝任照護以及陪伴的關鍵目的。於是張禎元團隊中也有部分主力專注於機器手的研發,並已在數年之中取得相當驚人的突破。這項研究成果已發表於期刊 IEEE Transactions on Industrial Electronics2。
張禎元團隊的機器手有什麼特別呢?第一,百分之百國產的多功能智慧夾爪,除了工程規格具國際競爭力,擬人機器人手亦可作為義肢使用;第二,內嵌多重感知系統以提升表現,除了可以將人類肢體動作數位化精準記錄之外,指尖上運用磁力計量測磁場轉換成力量資訊的 3D 力量感測裝置,更可做為機械手感知來源,精密地回饋受力狀況。
1. Pu S. W., Pei Y. C. & Chang J. Y. (2020). Decoupling Finger Joint Motion in an Exoskeletal Hand: A Design for Robot-Assisted Rehabilitation. IEEE Transactions on Industrial Electronics, 67(1). 2. Chang H. T. & Chang J. Y. (2020). Sensor Glove Based on Novel Inertial Sensor Fusion Control Algorithm for 3-D Real-Time Hand Gestures Measurements. IEEE Transactions on Industrial Electronics, 67(1).

 張禎元研發機器手,讓鋼彈不是夢想!(圖/fatcat11繪)
張禎元研發機器手,讓鋼彈不是夢想!(圖/fatcat11繪)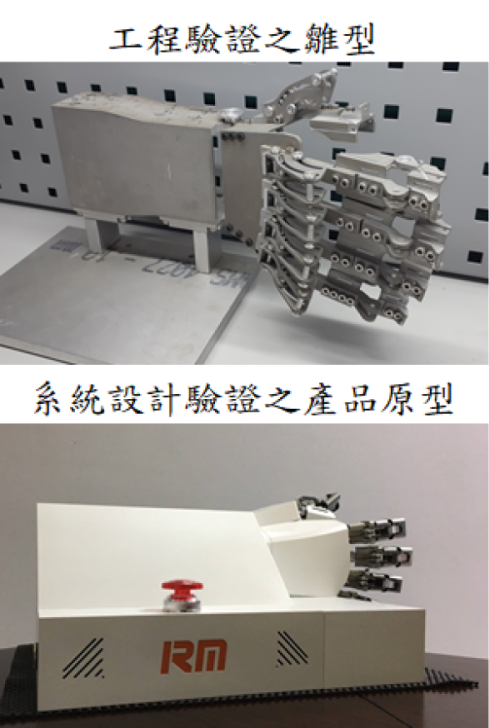 執行科技部輔具計畫之開發成果,其成果更進一步由科技部輔導成立富伯生醫科技股份有限公司,由企業重新研發打造並產品化。(圖/張禎元提供)
執行科技部輔具計畫之開發成果,其成果更進一步由科技部輔導成立富伯生醫科技股份有限公司,由企業重新研發打造並產品化。(圖/張禎元提供)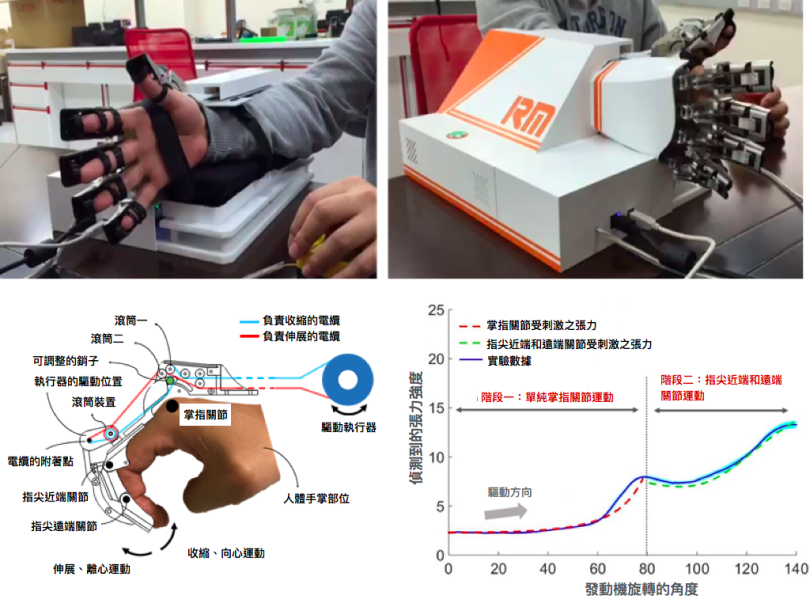 取得國際專利可由線張力評估關節鬆緊程度的復健機器手。(圖/張禎元提供,作者中文化)
取得國際專利可由線張力評估關節鬆緊程度的復健機器手。(圖/張禎元提供,作者中文化)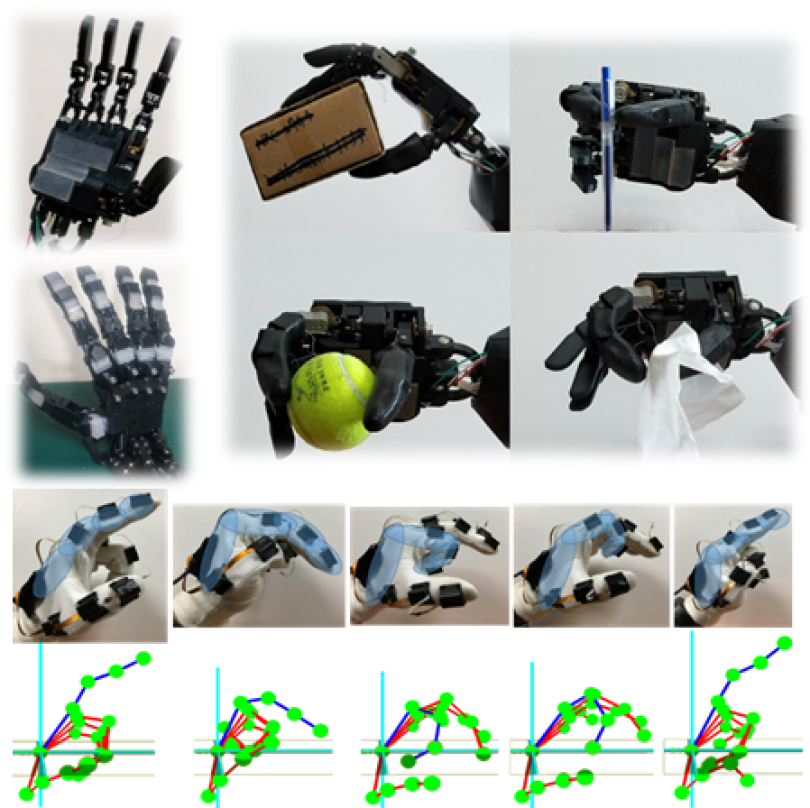 技術突破:可用於機器人或者義肢的精巧擬人機器人手以及內嵌多重感知穿戴系統。(圖/張禎元提供)
技術突破:可用於機器人或者義肢的精巧擬人機器人手以及內嵌多重感知穿戴系統。(圖/張禎元提供) 張禎元教授(右)、清大動機系博士生卜書偉(左)研究團隊跨領域合作,為運動失能者開發穿戴式機器人手掌、手指復健輔具。(圖/張禎元提供)
張禎元教授(右)、清大動機系博士生卜書偉(左)研究團隊跨領域合作,為運動失能者開發穿戴式機器人手掌、手指復健輔具。(圖/張禎元提供) 姓名標示─非商業性─禁止改作
姓名標示─非商業性─禁止改作