自駕車如何確認環境周遭?
自駕車可以透過各式各樣的感測器來確認周遭環境的安全,目前自駕車的感測裝置大多是結合各類型的感測器,讓車子能夠得到足夠的資訊去作決策,而搭載於自駕車上較為常見的感測裝置有:光達(LiDAR)、攝影系統(Camera)、雷達(Radar),以及超音波(Ultrasound),詳細功能介紹如下:
光達(LiDAR)
是一種主動式光學感測器,主要是透過光撞擊至物體後反射回感測器之光束飛行時間,這段時間我們就可以計算出光達與物體之相對距離,並依照所收集到的相對距離資料,即可換算為2D或3D的物理座標,3D的物理座標又可依照光束的數量分為8線、16線、32線及64線,光束數量越多,代表能夠顯示的畫面解析度越好,然而當光束數量超過64線以後,其成本將大幅增加,因此市面上普遍採用的光束數量為32線及64線,同時配合可調整角度的光源,使其能夠獲得更大的視角。目前光達已經有許多實際的產品了,只不過這些產品在資訊安全上仍然還是需要更加完備的防駭驗證,以避免遭受到惡意的駭客攻擊。
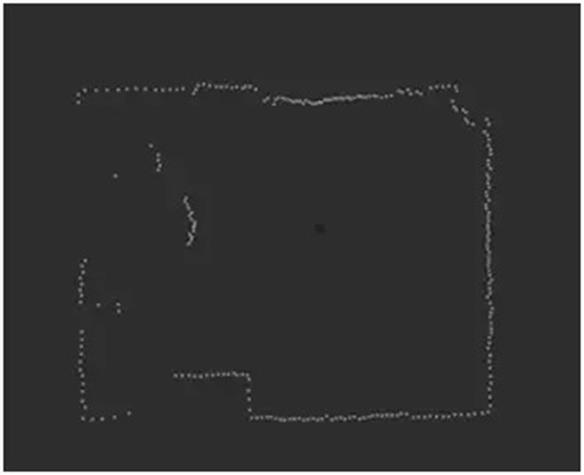 LiDAR針對周圍牆壁的2D掃描。(圖片來源:T客邦/https://reurl.cc/9zd8a)
LiDAR針對周圍牆壁的2D掃描。(圖片來源:T客邦/https://reurl.cc/9zd8a)
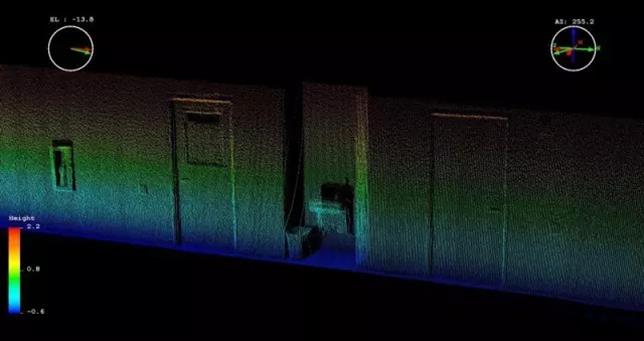 LiDAR針對牆及飲水機的3D掃描。(圖片來源:T客邦/:https://reurl.cc/9zd8a)
LiDAR針對牆及飲水機的3D掃描。(圖片來源:T客邦/:https://reurl.cc/9zd8a)
攝影系統(Camera)
如同人類的眼睛一樣,是一種被動式光源感測器,主要的元件組成有:鏡頭、光圈、影像感測器,「鏡頭」主要為調整角度及焦距,具有高解析度,以利判斷交通號誌以及汽車是否有保持在車道上;「光圈」則可以控制光線進入的多寡使得影像不論白天或夜晚,皆能保持影像的清晰;「影像感測器」則是負責最後的感光成像。
雷達(Radar):是一種主動式電磁波感測器,透過電磁波撞擊至物體後反射回感測器之電波飛行時間,我們可以計算出雷達與物體之相對距離,雷達的優點在於其穿透性及抗干擾力強,能夠在全天候使用,夜間駕駛也不需擔心無法偵測到周圍的車輛,缺點在於解析度較低,使得分辨物品能力不夠精確,故需要倚靠攝影系統(Camera)去輔助判讀周遭物品。
超音波(Ultrasound)
是一種主動式聲波感測器,透過聲波撞擊至物體後反射回感測器之聲波飛行時間,我們可以計算出與物體之相對距離,但是超聲波會因其音波擴散的物理特性,導致取樣範圍過大、解析度較低,因此,該感測裝置通常使用在停車輔助系統上。
綜整上述自駕車所裝載的感測裝置,我們舉個實際的例子即可更加瞭解各感測裝置的功能,例如:在一個狂風暴雨的夜晚中,你決定搭乘自駕車返家,行駛於返家的路途中,攝影系統(Camera)作為主要的觀測,幫助車子分辨周遭的環境,像是交通號誌、是否行駛於車道上,長距離雷達(Long-range Radar)則可以協助自駕車做定速巡航,中短距離雷達(Mid-range Radar)則負責盲點偵測,避免有車子過於靠近而電腦無法得知,光達(LiDAR)則負責在行車的路途中,偵測車與行人的距離以避免碰撞,同時也具備緊急煞車系統以避免碰撞發生,到了家,你也不需要為停車一事而煩惱,自駕車會透過超音波感測器(Ultrasound)去輔助自駕車停車,你可以直接進入家中休息。
如何確保交通上的安全?
當車子利用感測裝置來感測周遭環境、透過機器學習來大幅提升影像辨別的準確率,讓車子不會因為將出現於道路上的一個紙袋錯認成一顆石頭,而產生了錯誤的決策;此外,自駕車還能透過名為「車聯網V2X」的技術,讓車子能夠從公共設施取得資料,例如:目前的交通號誌是綠燈還是紅燈,車子之間都可以互相地提供資訊,使得自駕車能夠掌握與前、後車的車速及車距,大幅提升安全性。「車聯網V2X」技術全名為Vechiel-to-everything,它整合了「車對車」(V2V, Vehicle-to-Vehicle)、「車對路」(V2R, Vehicle-to-Roadside)、「車對基礎建設」(V2I, Vechicle-to-Infrastructure)與「車對人」(V2P, Vechicle-to-Pedestrain)等技術,讓車子能夠及時掌握到所有必要的資訊,如:號誌燈是否已轉為綠燈了、前方路況是否施工中以及與前後車是否有保持安全距離等…,使其能夠依據上述的資訊,進而做出正確的決策,從而確保道路交通以及人身的安全。
藉由上述的介紹,讀者們應該對於自駕車的構成有了基本的概念,它結合了各種類的感測裝置、機器學習以及車聯網V2X等高科技技術,這確實提升了乘客、行人以及道路交通的安全性。雖然自駕車能給予現今社會更快速、便捷且安全的交通環境,但是智慧運輸該如何推廣、專用道路該如何規劃、相關政策該如何擬定?方能讓足以使整個世界再進行一次大轉變的高科技技術-「智慧運輸」落實於你我生活中,這的確是個考題!
參考資料:
1.工研院:無人駕駛車/自駕車技術探索
https://ictjournal.itri.org.tw/Content/Messagess/contents.aspx?MmmID=654304432061644411&MSID=745621454255354636
2.Self-driving car
https://en.wikipedia.org/wiki/Self-driving_car
3.自動駕駛正當紅,但它的定義、原理與未來應用問題在哪裡?
https://technews.tw/2017/01/18/what-is-autopilot/
4.無人駕駛車時代來臨了嗎?─自動駕駛技術面面觀
https://scitechvista.nat.gov.tw/c/sg8t.htm
5.2018年自動駕駛車敢射器展望
https://www.eettaiwan.com/news/article/20180302NT31-Outlook-for-Robocar-Sensors-2018
總編輯:國立中山大學資訊工程學系 黃英哲教授
(本文由科技部補助「
新媒體科普傳播實作計畫」執行團隊撰稿)
