
115/05/28
斷層之上看見風險 地震防災科技重塑預警與應變
陳玉鳳|
科技大觀園特約編輯

圖一:對農民來說,不同作物皆需大量人力的農事處理,如除雜草、降低病蟲害及除新梢。(影像來源:Unsplash)
臺灣位於亞熱帶地區,面積小卻有豐富的地形地貌,一年四季皆有水果作物盛產,自日治時代以來素有水國王國的美稱。然而,隨著臺灣步入超高齡社會,這些平常出現在餐桌上的水果,背後其實正面臨著人力短缺與經驗傳承的問題。因此,如何透過科技的研發,幫助農民進行更有效率的農務,並學習與傳承農業專家的經驗,成了迫在眉睫的工作。
農事繁忙、勞動力又不足,科技如何助力農村?
讀者可曾試想過,一棵棗樹從栽培到結果收成需要多少作業嗎?為了生產高品質的蜜棗,在幼果時期農民需要經過三次以上的疏花、疏果(blossom thinning),以減少養分消耗在劣花劣果上,而影響到蜜棗品質。然而,該怎麼摘除、哪些是可摘除的劣果,這全仰賴農民日積月累的經驗。除了疏花疏果外,不同作物也皆需大量人力的農事處理,如除雜草、降低病蟲害(pest control)及除新梢(new shoot pruning)等。
為了因應農業勞動力不足,國外也相繼有許多新創公司與研究團隊投入農業機器人的研發。瑞士著名的農機開發商 ecoRobotix 在 2018 年開發出智慧型除草機器人,透過人工智慧辨別雜草,並將農藥精準噴灑於雜草,據稱可減少用量 20 倍。
西班牙的農業機器人新創公司 Agrobot 開發「吸蟲機器人 Bug Vacuum」,利用自動導航和真空吸蟲方式對草莓害蟲進行防治,目前已在草莓園測試,並投入市面販售(根據 futurefarming.com 網站 2021 年公布的資料,售價約為三百萬台幣)。
除精準噴藥與真空吸蟲等機械式處理外,為進一步降低農藥對生態環境的危害,德國塑膠製造商易格斯 igus® 開發出雷射除草無人車(unmanned ground vehicle,簡稱 UGV),可自動辨別出會危害各種作物的雜草,再以短脈衝雷射照射雜草葉子或莖桿上,使其生長減緩。
臺灣團隊結合雷射和無人車,打造果園機器人
自 2017 年底,國立陽明交通大學光電學院適應性光子實驗室(後簡稱研究團隊)試圖將累積的智慧光電(intelligent photonics)與 UGV 技術導入傳統的農業機械,開發具 3D 雷射瞄準的果園機器人,尤其運用在減少農藥污染、大量人工需求及挑戰性極高的果樹除蟲、疏花及除新梢等農務。
智慧光電與農業 UGV 的結合,是農業防治與省工機具未來發展的重點之一。一般農地地形複雜多變,臺灣的農地或果園更是崎嶇,而智慧光電與農業 UGV 的結合,是農業防治與省工機具未來發展的重點之一。
團隊開發出的果園雷射機器人,以能適應各種坡型的履帶車為載具,透過車上的深度相機及視覺里程術(visual odometry)來判斷車體目前位置與姿態(如圖二右下),具有智慧路徑規劃(path planning)以及藉由深度強化學習(deep reinforcement learning)進行路徑追蹤(path tracking)與各式障礙物迴避(obstacle avoidance)功能,使車體能夠無障礙下自由行走於崎嶇果園,到達須雷射處理的果樹旁。
此外,車體搭載一套具有深度相機的 24 瓦雷射系統,預先透過害蟲影像學習,建立起害蟲辨識的神經網路模型(如圖二左上)及其頭部 3D 定位,將此 3D 定位資訊傳送給雷射,即時進行立體瞄準。透過高瓦數的藍光雷射,僅需 0.1 秒的雷射劑量,就可有效破壞害蟲頭部附近的動脈血管與觸角,使害蟲不僅失去嗅覺能力,更無法將體液輸送至口部進行咀嚼與養分補給,害蟲即因為無法進食而死亡。
同樣地,可在果園進行精準(雷射瞄準於一兩米內可達 3D 毫米等級)及有效率(雷射光束對準棗花花藥、蓮霧新梢生長點)的雷射處理。
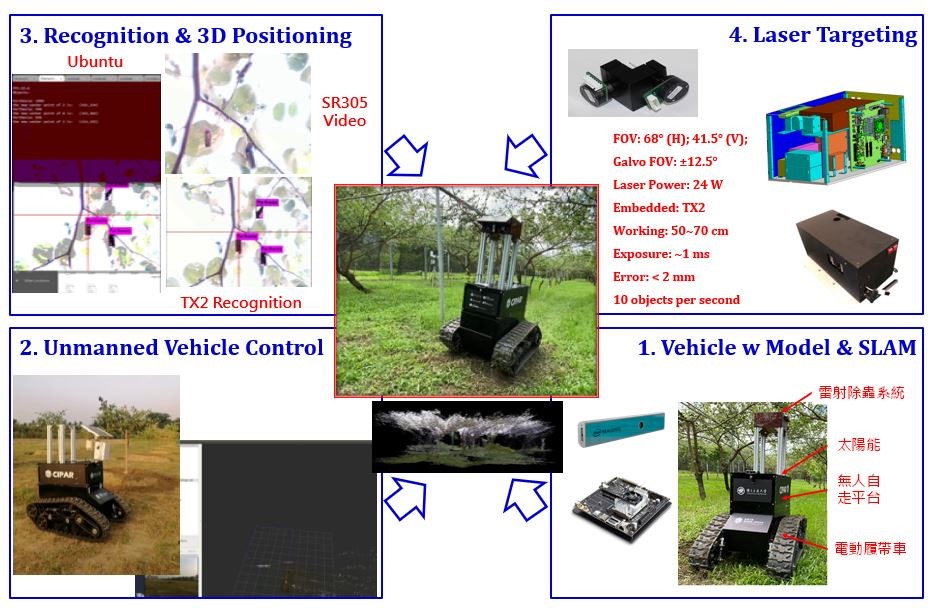
圖二:研究團隊所開發之果園雷射除蟲機器人以履帶車為載具,可透過(1) 深度相機及視覺里程術取得車體位置及姿態,並藉由(2)深度強化學習進行路徑追蹤與避障;此外,以(3)小物件偵測技術達成害蟲辨識以及立體定位,藉由撘載於機器人上的(4)雷射系統進行精準雷射除蟲工作。(影像來源:國立陽明交通大學光電學院適應性光子實驗室)
機器人成本降低、技術持續升級
科技的日新月異,也同樣逐漸降低高瓦數雷射與高容量電池的造價,最近兩三年鋰電池因規模化生產,價格僅為 2008 年的 1/10,上述果園雷射機器人的硬體成本也逐步降至二十五萬元內。根據研究團隊的估算,以一度電來看,可進行約一百萬次目標的雷射除蟲;而 UGV 行走控制與目標 3D 定位更因深度學習而降低許多的運算電力。
在果園雷射機器人有限的電力下,有效的雷射瞄準方式更可以符合農業實用性的要求。以 5 千瓦特時(kWh)電量鋰電池的果園雷射機器人為例,每次充電後可工作至少 10 小時。
此外,果園機器人實際運作時,風會使得害蟲隨著樹葉擺動,影響雷射瞄準,目前利用多重物件預測技術(multiple object forecasting)來改善;另外,動態隨機障礙物的避障,可進一步利用深度動力學建模(deep dynamic modeling)、模型預測控制(model predictive control)及深度強化學習等技術融合來處理。
如何使果園雷射機器人位置與姿態更強健、於果園路徑追蹤與避障更熟練以及具多重農業物件預測之 3D 雷射瞄準等皆須進一步開發,以期對於現有機器人做突破性與實用性的提升。
團隊盼能藉科技的力量助力農民
農業機器人的研發,需要跨領域的整合。研究團隊在國科會、教育部及農委會的經費補助下,聆聽各方需求後,暸解農機廠商在研發上的難處、資深農民對於務農條件的無力與青黃不接的經驗傳承。
縱然,近年來國家對青農有諸多支持,但是人力的缺口是不爭的現實。研究團隊盼能透過團隊的努力,協助農機廠商進行研發,往農機電動化、智慧化及無人化發展,開發出更具前瞻性的農業機器人,協助次世代農民耕作。
 姓名標示─非商業性─禁止改作
姓名標示─非商業性─禁止改作
本著作係採用 創用 CC 姓名標示─非商業性─禁止改作 3.0 台灣 授權條款 授權.
本授權條款允許使用者重製、散布、傳輸著作,但不得為商業目的之使用,亦不得修改該著作。 使用時必須按照著作人指定的方式表彰其姓名。
閱讀授權標章或
授權條款法律文字。