
自駕車的路線有圖可循,背後的高精準度地圖來自於精密的導航系統。圖片來源:Andrés Gómez García/Flickr。自動駕駛車是這幾年相當熱門的議題,包括Tesla、Google都投入相當多的資源進行開發,但要讓一台自駕車能夠成功地行駛在道路上,當中隱藏著許多最新的科技,就功能面上,這些科技大致可以分為:「感知」、「導航」和「控制」三大區塊,本篇文章主要為介紹其中的導航系統。
說到導航系統,一般就會聯想到GPS,GPS又可稱作全球衛星定位系統,是由美國所開發的衛星定位科技,這套衛星定位系統基本設計共有24顆衛星(目前運作中的衛星為31顆,由於衛星的壽命長短不一,美國每年都會發射一些衛星來更新這個系統),這些衛星繞行在地球的四周,並分布在 6 個平面上,由於其衛星軌道經特殊的設計與安排,使得GPS接收器在地球上大約98%的位置,只要不被障礙物遮蓋,都可以接收到至少4顆以上衛星的訊號。而之所以需要至少4顆以上衛星的訊號,主要是作為3顆衛星的三角定位使用與1顆的輔助定位。
只要三顆衛星就可以決定你的位置?
要決定你的所在位置,需要利用衛星的三角定位原理,要做到三角定位,首先要量測你和衛星的距離,要測得兩點的距離,可由速度和時間差間接求得(距離=速度x時間),因為衛星會不斷向地表發送訊號,地面上的GPS接收器也會不斷接收衛星訊號,所以藉由衛星發送訊號與地面接收訊號的時間差,乘上已知訊號的傳送速率,將可以得到衛星與地面GPS接收器的距離。
因為衛星不斷向四周發送訊號,若以衛星為圓心,以前述衛星與GPS接收器的距離為半徑,劃出一個球體,它的球面上的每一點都是這接收器可能的位置。那這接收器到底在哪一點? 這時若有這接收器與其他兩個衛星的距離,那總共可以畫出三個球面,而這三個球面會交會出兩個點,這兩個點有其中一點必會在地球表面上。因此若可得三顆已知衛星的位置以及它們與地面接收器的距離,就可以知道接收器在地表上的實際位置。
但是透過上述原理只能得知接收器在地表上的大概座標,因為衛星訊號在傳送與接收的過程中,有著容易受環境干擾而不穩定的問題,所以通常需要用到第四顆衛星或是差分全球定位系統(請參考名詞解釋)來確保前面三顆衛星計算結果與提高精確度,當然能參考的衛星點越多,位置的計算結果將越準確。
 一顆衛星,則在球面上的任一點,都可能是接收器的位置,兩顆衛星,可以定義一個圓,在這個圓面上,都可能是接收器的位置。三顆衛星,則可定位出兩個位置,如圖中的X,而在地球表面上的那一個X,就是接收器在地表上的實際位置。(圖片來源:https://www.e-education.psu.edu/geog160/node/1923)
一顆衛星,則在球面上的任一點,都可能是接收器的位置,兩顆衛星,可以定義一個圓,在這個圓面上,都可能是接收器的位置。三顆衛星,則可定位出兩個位置,如圖中的X,而在地球表面上的那一個X,就是接收器在地表上的實際位置。(圖片來源:https://www.e-education.psu.edu/geog160/node/1923)
更高精準度的定位需求
高階無人駕駛的導航系統比傳統的車用導航有著更高精準度的定位需求,因為車輛移動速度相當快,加上車輛需要自主控制與決策,若定位只要稍有偏差,那麼後果就會不堪設想。而要如何實現高精準定位系統呢?其關鍵就是對於當前位置資訊了解得越多越好,所以現行的車用高精準度的定位系統,除了使用美國的GPS定位外,另外還會額外參考俄羅斯的GLONASS、中國的北斗(BDS)等衛星資訊。此外,若能配合數位地圖、地標,甚至是車內的慣性測量系統,就能使得定位的效果更加精確。
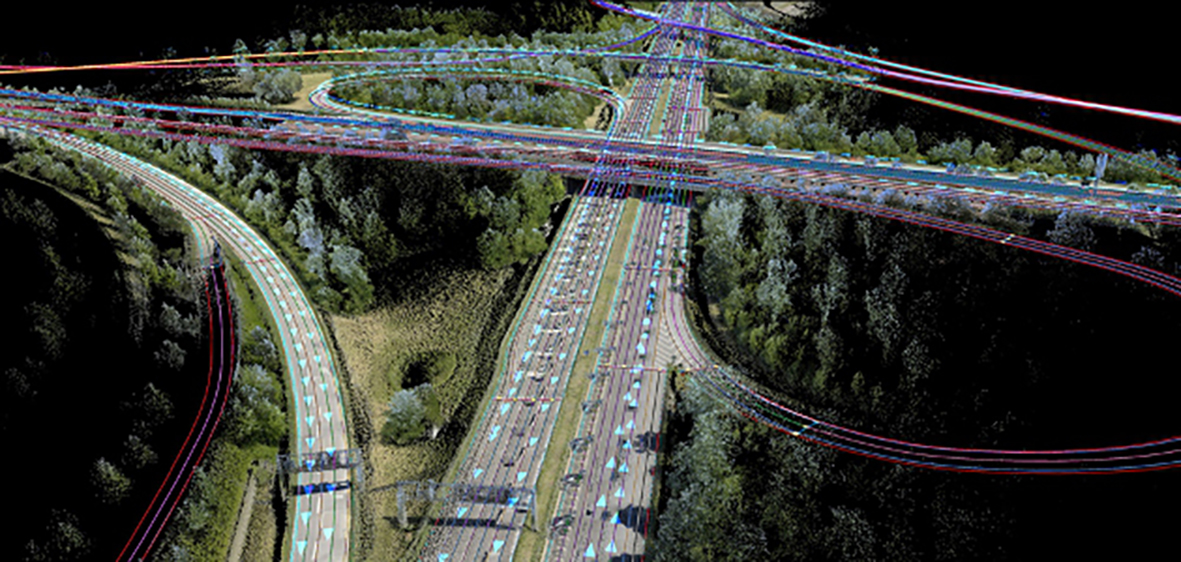 由NVIDIA 打造的,提供自動駕駛車所使用的高精準地圖,包含許多精密的道路相關資訊。(圖片來源:https://blogs.nvidia.com.tw/2016/04/self-driving-cars-2/#)
由NVIDIA 打造的,提供自動駕駛車所使用的高精準地圖,包含許多精密的道路相關資訊。(圖片來源:https://blogs.nvidia.com.tw/2016/04/self-driving-cars-2/#)
高精準地圖
為了實現高精準度的定位系統,所採用的數位地圖,當然也有著相當高準確度與較多細節資訊上的需求,這些為了自動駕駛需求而製作的精密3D數位地圖,我們也可以稱它為高精準地圖,以Mercedes-Benz所製作的高精準地圖為例,他們透過搭載立體攝影機的車輛,收集周邊的完整的道路資訊,並辨識有助於定位的道路特徵,例如建築物的角落、燈柱及道路標誌等, 也會偵測車道標線、方向箭頭、行人穿越道、停車線及路緣。與來自 GPS 的相關定位資料結合後,即可建立一份詳盡的路線影像,如此可大幅提升自動駕駛的準確性。此外,這些資料還可以隨時更新與提供即時的路況。
能否有效的保護自身與用路人的安全,一直都是自動駕駛最需克服的問題。隨著技術水平的提升,目前市面上車用定位的準確度已可提高到公分等級的水準,所以高精準度的定位系統在應用上,除了有導航功能外,也可以在其他感測裝置因為特殊狀況,如影像辨識在夜晚或因天候不佳而無法辨識時,仍能協助判斷周遭的交通狀況,進而提供許多關鍵性的保護作用。安全是自動駕駛最基本的配備,科技始終來自於人性,藉由人們的創意,提出更多有效的解決方案,也讓智慧駕駛不再只是個夢想。
名詞解釋
差分全球定位系統(DGPS):一種應用於全球定位系統中用以提高民用定位精度的一種技術,概念為在已精確測定位置上配備一台 GPS 接收機作為基準站,並將用戶GPS定位的結果與基準站坐標比較,以修正其GPS定位解,提高其局部範圍內用戶的定位精度。
參考資料:
1.精準空間定位 車載系統升級 提升自駕安全
http://iknow.stpi.narl.org.tw/Post/Read.aspx?PostID=14411
2.太空中 GPS 能定位嗎?世界強權為何搶著建置自己的系統?
http://technews.tw/2016/01/03/space-gps-china/
3.GPS 座標計算原理
https://pansci.asia/archives/10339
4. 全球衛星衛星定位(GPS)簡介
https://myweb.ntut.edu.tw/~twcheng/GPS-NTUT.pdf
總編輯:國立中山大學資訊工程學系 黃英哲教授
(本文由科技部補助「新媒體科普傳播實作計畫」執行團隊撰稿)
