
115/05/29
災害無法避免:避難設計與社會韌性成為關鍵
鄒明珆|
科技大觀園特約記者
圖一
自動駕駛車已不再只是科幻想像
自動駕駛車已經從科幻影集以及小說中,逐漸地出現在社群媒體、新聞與生活周遭。許多人對這樣的系統充滿了高度的興趣,也有許多人抱持著懷疑與抗拒的心情,畢竟這是第一次由工程師與科學家設計出與我們在同一個活動空間,一起互動、合作甚或是競爭的發明物。這篇文章將透過介紹自主系統與自動化的起源與差異性,讓你了解自動駕駛車感知能力的現況與尚待解決的技術問題。
自動化系統為人類展開新的一頁
科學與工程的發展都是以改善人類的生活為主要的目標,使用與開發各種技術讓生活變得更舒適,更方便輕鬆,讓人們可以減少花費在重複性高、耗費大量體力或繁瑣之工作的時間(例如:使用起重機搬運重物,使用洗衣機清洗衣物,使用腳踏車與汽車移動到不同地點等),將心力與時間專注在更需要智慧與情感的事情上,而人類的生活方式也因此產生了顯著的改變。這些都是「自動化系統」 (Automated Systems) 的貢獻。
自動化系統透過設計好的規則或是模型,控制與指引系統完成預先設計好的工作,目前市面上許多新發售的汽車都已經配備的先進輔助駕駛系統 (Advanced Driving Assist Systems, ADAS) 就是屬於此類,另外車輛上配備的盲點示警、車道偏移警示、定速巡航、車道維持,與自動跟車系統等也包含在自動化系統的範圍。這類系統的主要技術為感測器的訊號處理能力以及依照預先設計的規則或模型以發出通知或者控制車輛。在此我們以「車道偏移警示」與「車道維持系統」作為範例說明:
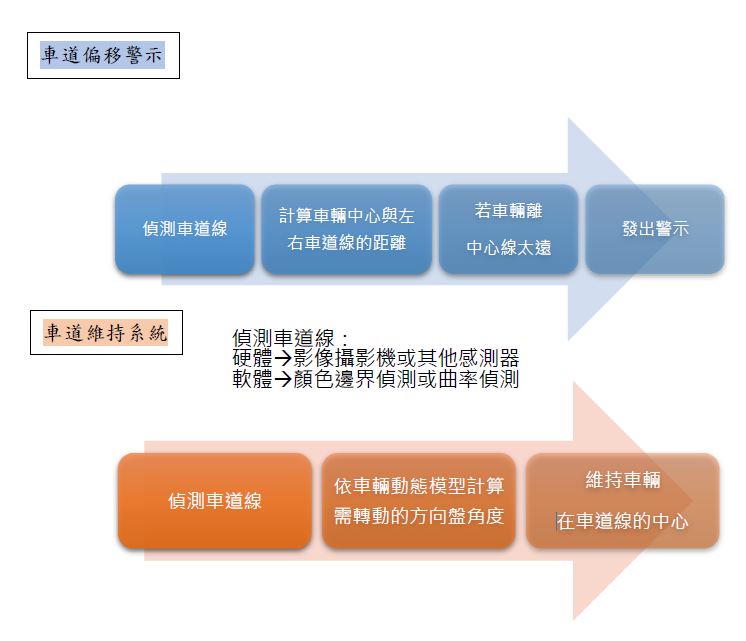
車道偏移警示、車道維持系統
從以上兩個範例可以看出現有的技術已經十分先進,但畢竟只是提供給駕駛的「輔助」系統,請試想天氣良好的狀態,電腦可以自動得到很好的偵測結果,但是,當車道線磨損或是下大雨或大雪的時候,因為感測器接收到的影像品質不佳,便很難準確地判斷,導致系統可能失效。因此,這類系統會在可以清楚偵測到車道線時,才通知駕駛人系統已經啟動,並不像駕駛人一樣隨時都可以將車輛控制在車道的正確位置上。
自動化系統?自主系統?傻傻分不清楚
自動化系統通常都會定義系統操作的條件,即當條件符合時,才會運作。因此,自動化系統比較常見於變化不大或有明顯標示的環境中,例如:生產晶圓的無塵室中、裝配程序固定的工廠中、無人倉庫,以及天氣良好且標線清楚的道路上等。若是條件無法滿足,系統便會停止運作或是使用者必須隨時接手負責判讀系統提供的資訊,進行決策並發出控制命令給系統。
很多科學家與使用者都認為系統應該可以更聰明智慧一點,因此有了自主系統 (Autonomous Systems) 的出現。自主系統的差異在於能夠針對部分未知的情境,模擬人類的決策模式,進行有智慧的決策以完成任務。所謂「未知的情境」指的是並未事先預知或是無法包含在規則內的情境,系統必須要能使用既有的規則進行判斷,或是從嘗試中學習新的決策規則。一個完美的自主系統,可以在完全不需要人類介入的情形下,完成任務或是中止任務。這也是目前市售車輛與未來車輛的主要差異。
自動駕駛車的發展與現況
自動駕駛車從汽車發明以來,世界各地的研究機構與私人機構都持續在此領域發展(執行的團隊有的是以傳統汽車廠為基礎,有的以資訊與人工智慧為基礎),已經有超過 50 年的歷史,而最近幾年則是大幅的進步,不再僅是實驗室的雛形,甚至開始以商品的型態出現在市場上銷售。不同的團隊在研發的過程中,使用的車輛因商業考量而有差異,涵蓋小型四輪車、貨車、大型機具或巴士等,但大部分都是以電動車為主要載具,另外也有少量以傳統汽柴油或是天然氣引擎的開發計畫。儘管這些形式在各處不同,但鑽研的軸心卻大都一致,那就是接著要來談到的三個主要次系統。
自動駕駛車是由什麼組合而成?
自駕車包含三個主要子系統:感知次系統 (Perception Sub-system),決策次系統 (Planning/Decision Sub-system),以及控制次系統(Control Sub-system)。在此逐一為你介紹:
(1) 感知次系統—類似人的感官系統,負責偵測車輛周圍的物體,與了解車輛所在的環境。它會使用許多的感測器(例如光達 (LiDAR)、雷達 (Radar) 、相機 (Camera) 和衛星定位系統 (GPS) 等)搜集資料,處理感測資料,最後將感知的結果提供給其他次系統。每一類感測器都具其不同的感測方式與限制,就像是人類會利用聽覺、視覺等收集不同的感官資料,因此,須將不同的感測資料融合之後,才能對環境有完整的感知,這些都必須經由電腦系統計算後才能完成。
(2) 決策次系統—會依據感知以及任務,產生任務規劃 (Behavior Planning)。例如:在車輛行徑過程中,是否要切換不同車道,需要依據路線規劃、周遭車輛的位置與速度等資訊進行綜合判斷。
(3) 控制次系統—負責控制車輛以完成規劃的任務。例如:當決策次系統決定要向外側切換車道時,控制次系統需要開啟方向燈,依據現有的車速計算方向盤的旋轉角度,並且在完成車道切換後恢復直線駕駛的任務。
以上三個次系統需要即時 (Real-Time) 地交換資料並更新次系統的輸出。
因為篇幅有限,在三個次系統中,本文先針對感知次系統說明相關技術與挑戰。感知次系統可分為兩種感測方式:
(1) 模擬人類感官能力的感測器—這類的感測器教導電腦軟體學習對周遭環境的感知能力。有別於傳統演算法(處理限定條件下的感測資料),新型態的機器學習演算法使用資料學習的方式,可建構出較不受特定操作條件和物件大小的限制之資料處理方式。生活中常見的影像感測器「相機」就是最典型的例子!雖然智慧型相機的感測能力仍比人眼差,但在大部分的使用環境中,只要使用足夠的資料,藉由人工智慧演算法,電腦對路上物件類別進行辨識的正確率可高達 90% 以上,如此一來,讓車輛知道周遭是何種物件就不是難事了!圖一與圖二是使用超過 200 萬筆在台灣道路上取得的資料,進行深度學習網路訓練之後,對應台灣街道上各種物件之辨識模型的例子,它不受地點、天氣和時間的限制。
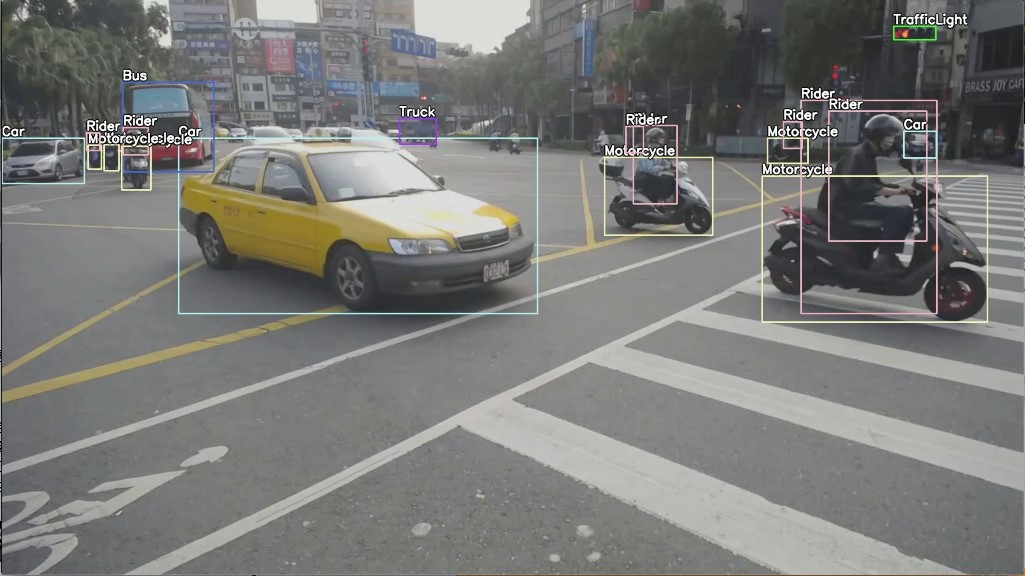
圖一:影像物件種類辨識。使用清晰影像進行辨識的結果(為了容易判讀,這個圖片僅顯示部份的物件類別),影像中的汽車、巴士、卡車、機車以及機車騎士等都可以進行正確的判斷。圖/台灣大學資訊系嵌入式系統暨無線網路實驗室提供
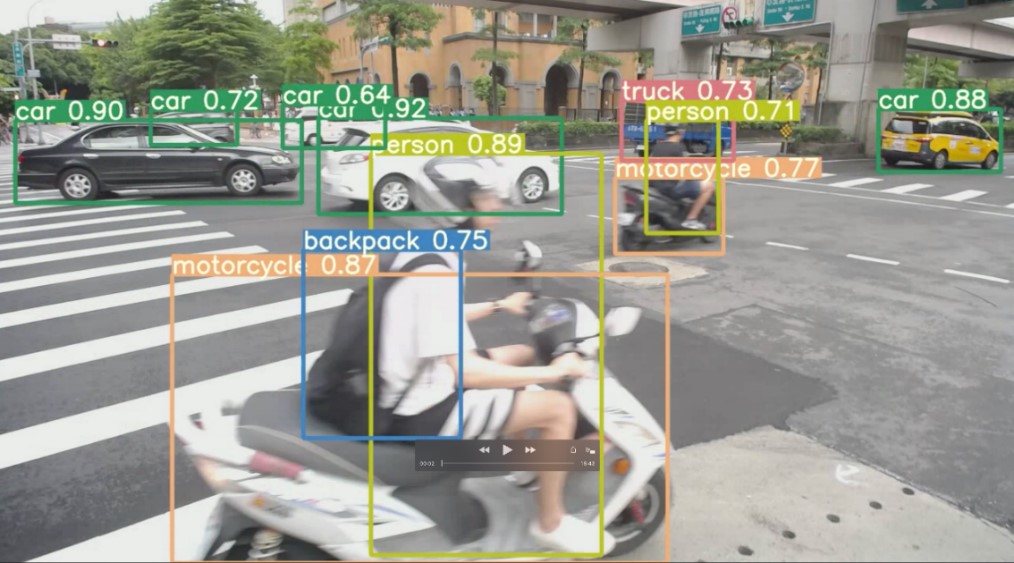
圖二:模糊影像物件種類辨識。使用相同的辨識模型,部份物件因為車輛高速移動,使得影像模糊,但仍可正確判斷出前方模糊的機車、機車騎士與背包等物件。圖/台灣大學資訊系嵌入式系統暨無線網路實驗室提供
需要注意的是,若在天氣惡劣與昏暗的情形下,則需要使用特殊的演算法,取得勉強可以接受的辨識率,或是使用其他類型的感測器輔助。
(2)超越人類感官能力的感測器:這一類的感測器使用人類不具備的感知能力,取得環境的感測資料,進行判斷,常見的範例如光達(利用主動發出可見光或不可見光到遠方的物件,在接收到反射回來的光後,依照時間差計算出物件與感測器的相對距離,也可利用反射光的強度評估物件的表面物質)以及聲納等。
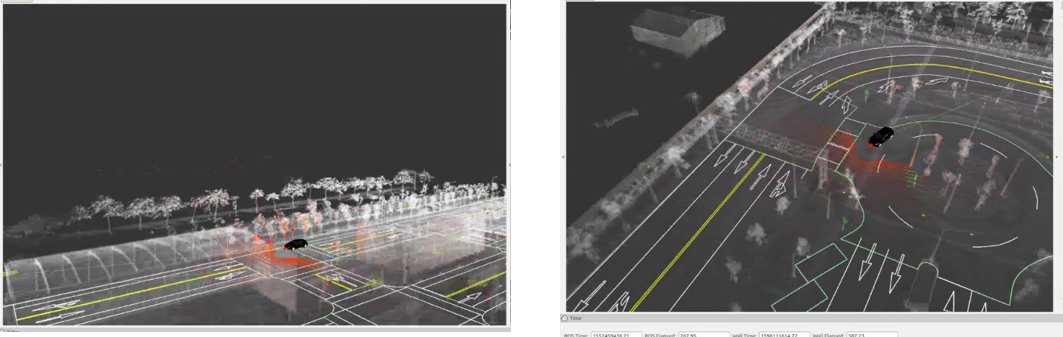
圖三:光達感測的點雲資料。每一個點都可以提供強度,以及三度空間的座標資料,因此,將資料視覺化之後,可以看到車輛在三度空間中的點雲資料集。因為可以提供準確的三度空間位置資訊,對自駕車系統判斷車輛在空間中的位置,以及周遭物件的位置相當有用。圖/成功大學測量系提供
不同的自駕車系統會選用不同的感測器組合,以符合系統的設計需求。目前大部分的自駕車系統都會使用光達,對周遭物件進行三度空間的資料收集。但是,特斯拉 (Tesla) 的自駕車系統則以影像相機為主要的感測器,提供感知的判斷。
視距外感知
車輛的主要功能為運輸,為了讓運輸的效益最大化,車速必須能夠加快,車與車的間距要能縮小,才能增加道路的使用效率。因此,必須在行車安全的前提下,盡量提升車速,但是現有的交通法規因為考量到駕駛人的反應能力、專注力與感知能力,車輛的間距會規定比較寬鬆,例如:前後兩車的預期碰撞時間不可短於1.5秒,而這個限制在使用電腦進行控制時可大幅縮短,以提升道路的使用效率;這類的技術就例如:視距外的感知、車輛間的通訊,與視覺盲點的即時感知。視距外的感知是利用路側設置的感知系統收集資料,將資料透過網路系統傳送給車輛,讓車輛可以取得視距外的道路狀況。圖四是一個將路口所觀察到的車輛與行人資料顯示在地圖上的例子。
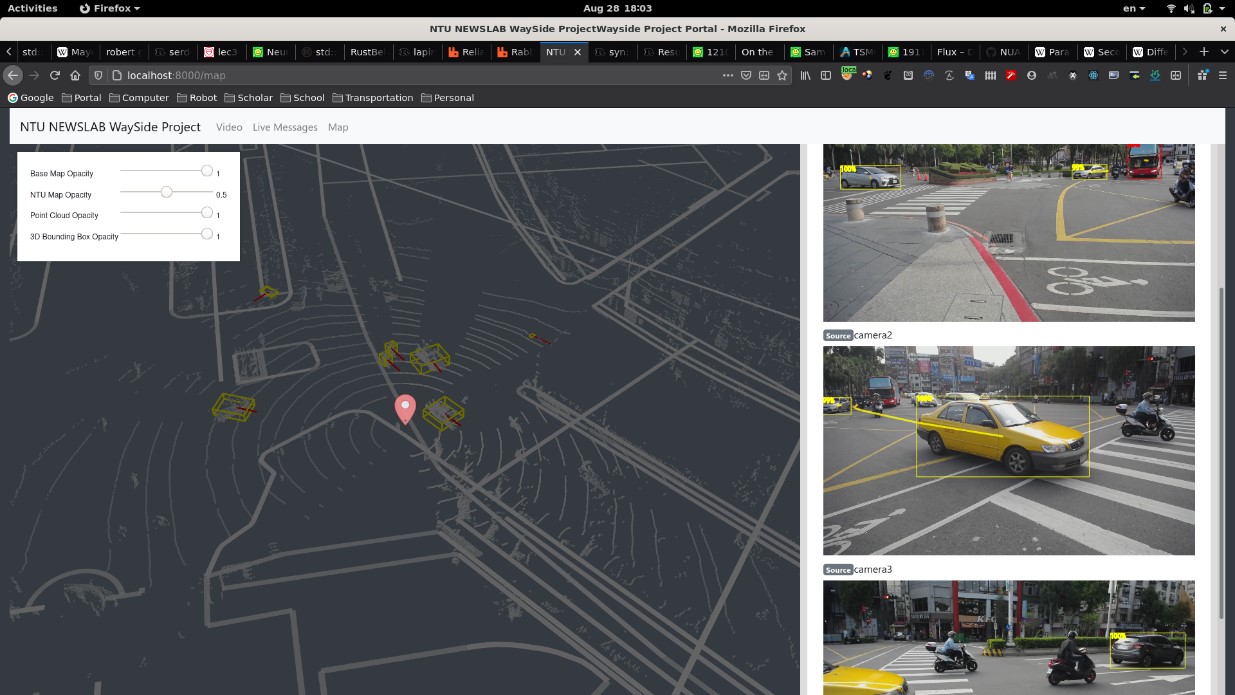
圖四:路側感知系統透過相機與光達,辨識出物件的種類,運動軌跡,移動方向等資料。這些資料可以透過網路傳遞給進入路口前的車輛,可以提早規劃車輛的行駛方式,因此,可以在安全的前提下,提升道路使用率。圖/台灣大學資訊系嵌入式系統暨無線網路實驗室提供
自駕車的挑戰
過去幾年,產業界與學術界對自駕車的感知能力,有了很大的進展,但對於實現自主式自駕車的理想世界仍有許多挑戰,而目前自動駕駛車如何與其他道路使用人互動是最主要的挑戰,其中有包含一重要的元素,即有經驗的駕駛人具備的防衛性駕駛能力(為避免自車被道路上其他使用者碰撞,因此駕駛人要能辨識其他道路使用者的危險行為外,並預測其他道路使用者未來的道路使用方式,方能趨吉避凶)。
舉個範例:車輛如果要變換車道可以藉由方向燈與車間通訊等方式知道其他用路人的意向,但並不是所有車輛都具有這樣的能力或是都依照正確的方式使用方向燈,因此,有經驗的駕駛人可以依據前方車輛在過去一段時間的駕駛行為來判斷是否即將變換車道。但對自駕車而言,要達到防衛性駕駛就沒那麼簡單,必須即時收集資料並且進行即時運算與決策,才能達成。
接著我們來討論目前最常用且發展較成熟的適性定速巡航 (Adaptive Cruse Control, ACC) 次系統:它能將車輛的速度依照駕駛人的設定控制車速,若前方無車,則車速會控制在設定的上限值;若前方有車,則在與前方保持安全距離的前提下,將車速控制在設定的上限值。原則上這個次系統會根據車前感測器偵測與前車的距離,來計算加速與減速的指令以控制車輛;當車流穩定前進時,大部分的系統都可以運作的很順暢,但若前方車速忽快忽慢,後方車輛對加減速偵測會因為車輛運動定律產生延遲(當適性定速巡航偵測到距離過近時,通常必須加大煞車的力量,以恢復到安全距離,而這類的加減速會導致後車產生的慣性阻力會比前車大,對乘客而言會相當不舒適),且這個現象會不斷繼續向後方車流傳遞,導致車流震波 (Traffic Shockwave) 與塞車出現。但駕駛人有經驗時,情況就不一樣了,它可依據前車的煞車燈以及更遠距離的車流狀況來判斷是否需要加減速,以避免急煞並保持安全距離。
那麼自駕車要如何達成防衛性駕駛呢?在缺乏車間通訊提供前車的車輛控制動作的前提下,僅能取得前車的速度與加速度變化等資料,可利用深層的類神經網路訓練出控制模型,讓適性定速巡航系統更準確的判斷出前車的意向 (Intention),並做出適切的加減速行為。這樣的行為可以計算車輛控制的瞬間加速度變化量 (Jerk, m/s 3) 來評估。依據國際標準 ISO 15622,車速在72km/hr 時,瞬間加速度變化量必須要小於 2.5m/s 3。圖五所呈現的是機器學習演算法與真實駕駛行為的瞬間加速度變化量比較,我們可以看出真實駕駛行為的統計結果左右兩側較機器學習演算法的結果寬,表示瞬間加速度變化量比較大,乘客的舒適度較差。自駕車的系統設定可藉由拉大車距來提升乘客的舒適度,但如此一來道路使用率相對就降低了。
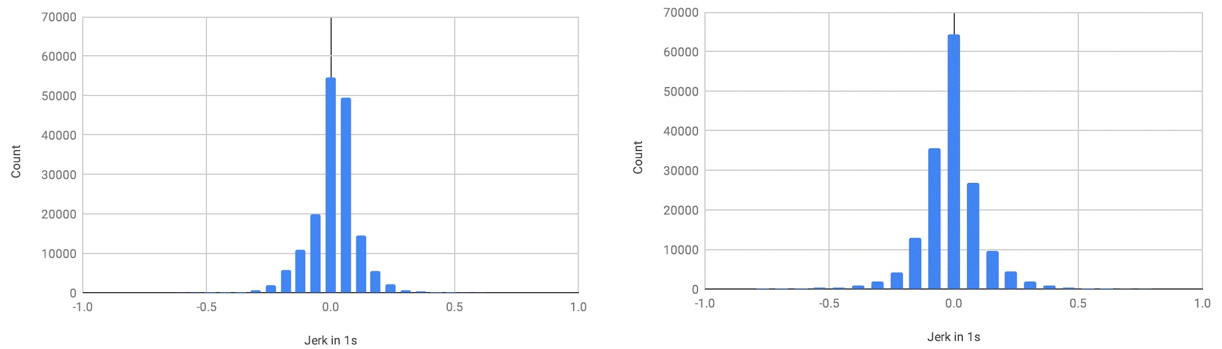
圖五:瞬間加速度變化量比較(左:機器學習演算法,右:真實駕駛行為)圖/台灣大學資訊系嵌入式系統暨無線網路實驗室提供
圖六顯示的統計數值是呈現同一個實驗中的車輛間距:安全值為大於 0.8 秒。左側的機器學習演算法駕駛的車輛其車間距集中在 1 秒左右,真實駕駛人的車間距則大範圍的分佈在 0.3~0.4 秒之間,表示有部分危險駕駛也有部分是降低道路使用率的駕駛行為。簡而言之,機器學習演算法可以更安全且更有效率地駕駛車輛。完整的實驗方法可參考文後列出的論文,研究團隊發表於 the 23rd IEEE International Conference on Intelligent Transportation Systems (ITSC 2020)。
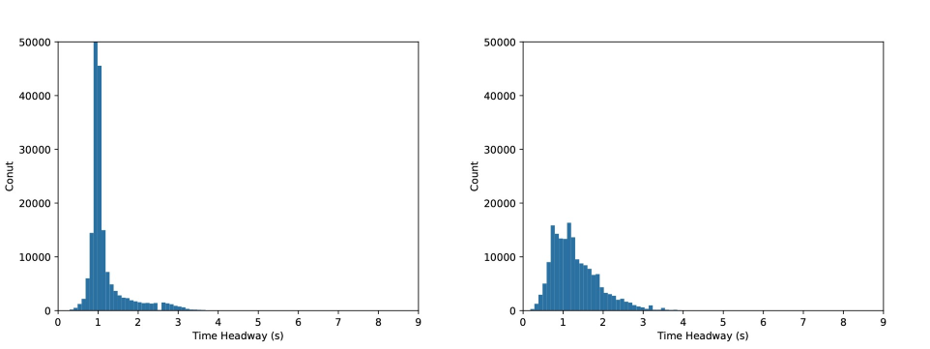
圖六:車間距時差比較(左:機器學習演算法,右:真實駕駛行為)圖/台灣大學資訊系嵌入式系統暨無線網路實驗室提供
許多的自駕車系統也使用電腦模擬驗證軟體的感知與判斷能力,Google 的自駕車在 2020 年四月已經可以使用超級電腦在 24 小時內完成模擬自駕車行駛 150 億英里的駕駛實驗,但是一直到目前為止,在實際道路上的行駛里程數只約 2 千萬英里,使用這種方式訓練出來的自駕車系統,仍然無法處理所有的道路狀況,自駕車在道路行駛的統計資料仍然限制在特定的地點,並未包含惡劣的氣候與缺乏明確交通標示之道路等範圍。
30 年前還有人辛苦地手洗衣服,今日已經家家戶戶使用洗衣機,這是自動化系統帶給大家的生活便利。在可預見的未來,自駕車的發展將是不可避免的潮流,自動駕駛軟體將取代人類駕馭車輛。不過,在自動駕駛普及前,還有很多挑戰需要克服,在夢想成真之前,大家還是需要去考駕照的。
 姓名標示─非商業性─禁止改作
姓名標示─非商業性─禁止改作
本著作係採用 創用 CC 姓名標示─非商業性─禁止改作 3.0 台灣 授權條款 授權.
本授權條款允許使用者重製、散布、傳輸著作,但不得為商業目的之使用,亦不得修改該著作。 使用時必須按照著作人指定的方式表彰其姓名。
閱讀授權標章或
授權條款法律文字。