
115/05/28
斷層之上看見風險 地震防災科技重塑預警與應變
陳玉鳳|
科技大觀園特約編輯
2025 年,台灣將步入超高齡社會,65 歲以上的老年人口將佔總人口的 20% 以上,未來醫療照護的需求只會越來越多,而其中復健更是費時且勞力密集的工作。近幾年來自動化機器人投入工業市場,除了可以代替人類處理高危險或繁瑣的工作,也成功使勞動成本下降。如果想將機器人投入到醫療照護方面,機器人勢必要學會更靈活細緻的動作。
清華大學動力機械工程學系的張禎元特聘教授是美國卡內基美隆大學機械工程博士,並曾任職於美國 IBM,專長是精密機電整合與穿戴式復健機器人等。在科技部「客製化機器人輔助手掌 (指) 開合物理復健輔具系統開發」的邀請下,與任職於長庚醫院復健科醫師的小學同學裴育晟醫師合作,設計幫助中風患者手部復健的穿戴式機器手。張禎元教授所帶領的機器人實驗室(Vibrations, Mechatronics & Robotics Laboratories)結合人工智慧、醫學與人因工程,研發出有視覺、觸覺且動作跟人一樣流暢的機器手臂。

隨著台灣步入超高齡社會,長照的需求大增,該如何解決年輕勞動力不足的問題是一大考驗。圖/Pixabay
衛福部於 108 年發布了國人十大死因報告,中風排在了第四名。中風後常常伴隨著肢體僵硬、手指緊握的症狀,是因為大腦失去對脊髓神經的控制能力,使脊髓神經變得非常敏感,常常傳遞訊號使肌肉張力過高。這時復健治療就很重要,透過重複活動來保持肌肉、韌帶的彈性,協助神經受損部位恢復正常功能。
給予復健治療的醫療人員必須把病患十根手指一根一根掰開再合上,不停地重複同樣的動作,是費時且勞力密集的工作。不僅對將步入高齡化社會的台灣是個沈重的負擔,也無法保證每一次治療的拉伸動作都一致,更無法精確紀錄病患各個關節的復原程度。
像是穿上鋼鐵人盔甲一樣──鏡像手
張禎元教授受到科技部「客製化機器人輔助手掌 (指) 開合物理復健輔具系統開發」的邀請,設立醫療照護服務型機器人專案,將人工智慧、醫學、生物力學與人因工程做結合,研發出主動型復健機器手。在科技部的輔導下,張禎元教授的穿戴型機器手技術轉移給富伯生醫公司,經研發改良,讓復健用的「鏡像手」得以成功面市!
不同於以往線拉力的大型復健儀器,「鏡像手」僅 650 公克,能使治療擺脫場地的限制,像是穿上外骨骼一樣,訓練對真實物件的抓握、實施鏡像治療,並同時透過線張力紀錄患者手部各個關節在活動時的鬆緊程度、角度,建立資料庫。療程中收集的數據可以分析出專屬的數位復健療程,再透過精準的機器人復健,加快病患的神經連結。

由健康的右手做動作帶動左手患側復健,體型輕便,進行復健時可以與真實物體做互動。因為患者手部非常僵硬,研究團隊特別諮詢過醫生,對復健運動速度減慢避免拉傷,並將肌肉張力評估(MAS)控制在 1~1+。圖/泛科學攝影
什麼是鏡像治療 (Mirror therapy) ?
中風患者中有一大部分有半邊癱瘓的困擾,鏡像治療是將患側手放置於鏡後、健側手放置於鏡前,看著健側手在鏡子反射的影像想像患側手正在執行相同的動作。由鏡子反射的健側手影像刺激大腦中的前運動皮質區(premotor cortex)的活化,來促使患側手恢復肢體動作。

目前已經有多篇臨床論文證明鏡像治療能有效幫助肢體失能的中風患者增加關節活動程度和精確性。圖/wikipedia
「鏡像手」已於 2019 年成功拿到美國 FDA 認證,未來教授的實驗團隊想將上臂也做出來,全面的走入長照生活,像是家中老人需要彎腰提重物時,就可以穿上這套「鋼鐵人盔甲」,由機器人幫忙出力減少負擔;又或者長者手部控制不夠靈敏,拿菜刀不小心鬆開手時,機器手臂也能幫忙及時握緊減少危險發生。
機器人也可以是溫柔的紳士
早期的機器人大多應用在工業製造方面,主要追求快速、準確的執行命令,如果想將機器人投入到醫療照護方面,機器人勢必要學會更靈活細緻的動作。張禎元教授的團隊研發了一款更貼近人類的機器人──清華紳士,與其他機器手臂最大不同的是,清華紳士除了配有靈活度更高的七軸手臂能讓機器手臂折到人類無法伸到的角度,還有立體動態視覺、觸覺和軟硬兩隻手臂。

清華紳士的頭部配有鏡頭,視覺輸入影像之後透過人工智慧、數學運算來辨識物體品項和距離,讓手臂動作更加精確。圖/泛科學攝影
清華紳士可以依靠手指上的三維壓力感測器偵測所抓物體的壓力方向,就像我們的手上有觸覺神經一樣。對人類來說,感受東西的軟硬程度是極其簡單的事情,但對機器人來說可能不是。像是拿包子這種軟軟的東西時,人類會自然而然放輕動作,傳統機器手臂就容易因為力道過大把包子捏扁,張禎元教授的清華紳士可以根據指尖上的感測器偵測到的回饋力道放輕手指收攏的速度,應用在醫療照護方面時就能避免力道過大誤傷病患。
清華紳士配有兩隻手臂,可以依照使用需求裝上軟手或硬手,雖然能比工業用單一手臂做更多任務,但對設計者來說是一大考驗。像是在端盤子時,一隻手的時候只要平平的拿起來就好,兩隻手的時候就要配有協調、感知的能力,互相配合才不會傾向其中一邊,張禎元教授覺得這就是研發機器人的樂趣所在。
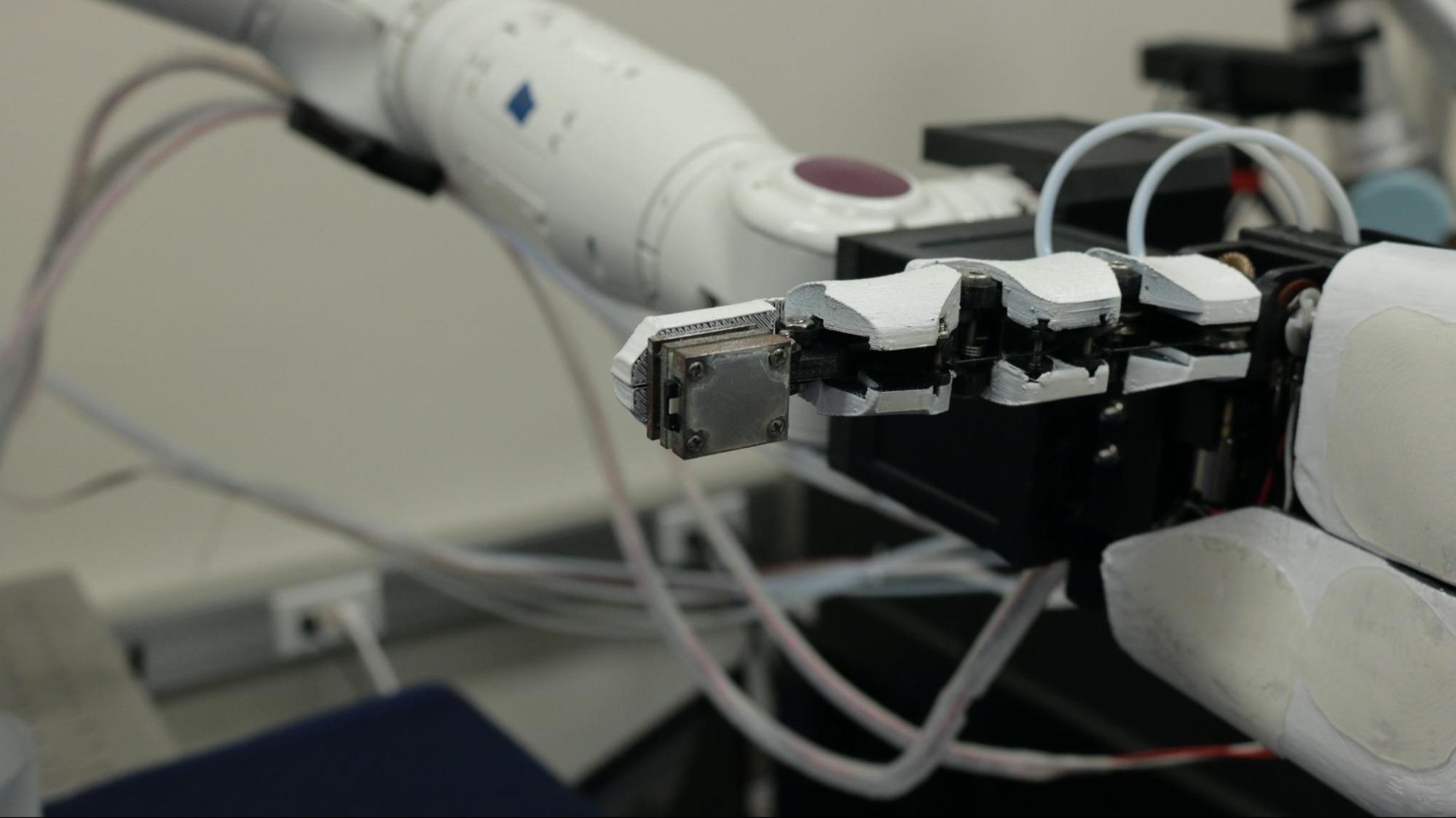
指尖的感測器能取得力量在 x、y、z 三軸的大小,實現人類的觸覺感受。圖/泛科學攝影
張禎元教授認為在設計機器人時應該更貼近人類,讓機器人也能使用人類的工具,不應該特地發明一系列「機器人專用工具」。以往在使用機器手臂時,操作員要先幫機器人換上專屬工具,再針對目標任務為每個關節分別輸入指令,耗時又耗力。有別於傳統機器手臂,清華紳士的手會在接觸物體的同時配合物體的輪廓自然而然的彎曲手指。想像小時候我們常常玩的捲尺手環,不論你的手腕粗細,只要往手腕一打,捲尺手環都能沿著你的手腕包覆。清華紳士的手也是同樣的道理,透過人工智慧和工程的技術整合,清華紳士就能跟人一樣,碰到物件的同時自動調正出最適合的拿法。

機器手臂能根據物體的輪廓自動調節每個關節角度來抓取物體。圖/泛科學攝影
傳統機器手臂給人的印象大多是堅硬的、一板一眼的,清華紳士的軟手臂採用氣壓傳動的方式,能更貼近人類的手部動作,溫柔地抓取物體。硬的手可以用感測器得到每一個關節的轉動角度數據,軟的手因為在三維空間中會隨意地移動,所以沒辦法裝上可變電阻偵測角度的轉動。像是手機有加速計、陀螺儀、磁力計來知道現在手機在空間中的位子,研究團隊成功研發出一款感測器裝在手指節上,能透過 14 個感測器回傳的資料計算出整隻手在空間中的姿態。

軟手臂採用氣壓傳動的方式,最大限度地貼近人類的手,相較於硬手能更溫柔地抓取物體。圖/泛科學攝影
整合各方人才創造價值
張禎元教授表示,能成功研發出清華紳士靠的不是頂尖的工程技術,而是懂得將已經擁有的技術整合。清華紳士由張禎元教授負責機電整合與結構設計,資工、電機系教授負責「腦部」軟體研發,是機械、資工、電機跨領域合作的結晶。
進一步詢問教授會建議什麼樣的人才投入這個產業時,答案令人驚訝!張禎元教授鼓勵美學人才也一起加入機器手臂的製作。對台灣來說,我們的工程規格世界領先,但一個產品的價值不只有工程,美學設計、產品理念也很重要,台灣不缺少專業人才台灣缺少的是價值定位者。教授舉了蘋果手機當例子,iPhone 如此成功除了本身的軟體外,面板材質、尺寸大小、背板顏色、商標位置都是經過嚴格設計的,價值就藏在這些小細節中。

張禎元教授鼓勵美學人才也一起投入機器人產業,創造更多價值。圖/envato elements
科學的研究發展包含研究(research)和發展(development),研究是重新找東西,同一個問題從不同角度去思考,我們要找的是所有能發揮價值的可能性,鎖定目標後再發展技術去實現它,像是思考機器手臂除了幫助醫療復健,可不可以也應用在日常生活甚至是軍事上呢?張禎元教授認為我們應該先訂方向(研究)再找研究缺口(發展),在提升單一技術的同時要不停的考慮,這樣技術還可以運用在什麼方面?還缺少什麼?
工程是科學的應用,是科學和經濟的結合,所以要懂得定義問題再來創造價值。張禎元教授建議工程方面學生除了具備自己領域的專業知識以外也要具備管理能力和企業家精神(entrepreneur),將格局放大才能知道自己的技術定位在哪裡,我們要做的不只是定義價值,最好能定義未來。
從各方報導和參展照片都可以看到許多學生展示跟解說機器手臂的身影,張禎元教授說:「學生才是主角,我不需要跟大家說我用了多少人做出這個手臂,我只要回家跟我太太報告就好了!」張禎元教授認為自己在他所帶領的機器人實驗室是「促成者」的角色,教授非常贊同學生站出來分享自己的研究,也鼓勵學生向自己提出想法一起找出可行的設計方向。作為領導者應該整合團隊創造出成果,跨領域人才的整合是未來趨勢,如何創造更多價值值得我們去發揮創意。
張禎元教授鼓勵美學人才也一起投入機器人產業,創造更多價值。圖/泛科學攝影
 姓名標示─非商業性─禁止改作
姓名標示─非商業性─禁止改作
本著作係採用 創用 CC 姓名標示─非商業性─禁止改作 3.0 台灣 授權條款 授權.
本授權條款允許使用者重製、散布、傳輸著作,但不得為商業目的之使用,亦不得修改該著作。 使用時必須按照著作人指定的方式表彰其姓名。
閱讀授權標章或
授權條款法律文字。